Hello all
More for the
“Pendulum rocket fallacy”
Suppose a rocket is pivotally mounted – though a long rod secured at its base – on a fixed to the ground point (pivot point at the lower end of the long rod), with the rocket center of gravity exactly above the pivot point and with its thrust force axis aligned to pass through the pivot point.
Intuitively the standing rocket (with its upright looking thrust) will remain standing.
However, the slightest disturbance (say, a fly (insect) that comes and seats on the one side of the rocket, or the softest wind, or a tiny asymmetry of the exhaust gas “beam”) will turn the rocket (and the thrust which is “fixed” to the rocket) by a tiny angle.
Now the weight force is slightly offset relative to the pivot point, creating a tiny moment that further increases the leaning of the rocket.
The rocket cannot help turning aside slowly at first, and then more quickly until the rocket turns upside down as a pendulum.
After a number of oscillations the rocket stabilizes looking downwards.
In the above simple example, the fixed to the rocket thrust has not stabilizing action, at all.
Take the same rocket, switch-off its engines and balance it on the long rod that abuts on the ground. The unstable equilibrium: the slightest disturbance would spark the falling of the rocket.
The solution is to displace the thrust axis relative to the center of gravity.
And this is
a dynamic process of the type: feel and react to correct.
This is what a bicycler, or a walking person, or a Portable Flyer pilot do uninterruptedly: they feel and react to correct.
In order to apply a corrective moment, Goddard would need to add a “control system” to vector the rocket relative to the rest vehicle.
This is what happens in the Gen_H-4:
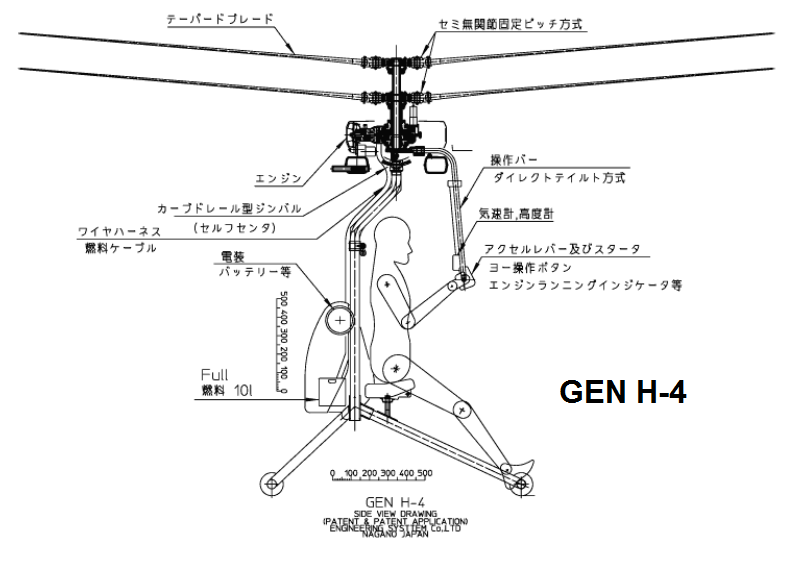
If you think of the rotors / engine assembly as the “rocket”, with the “rest vehicle” hinged to the “rocket”.
In the GEN-H-4 the control system is the pilot who, displacing the relative position of the two assemblies, changes the thrust axis relative to the center of gravity (Weight Displacement Control).
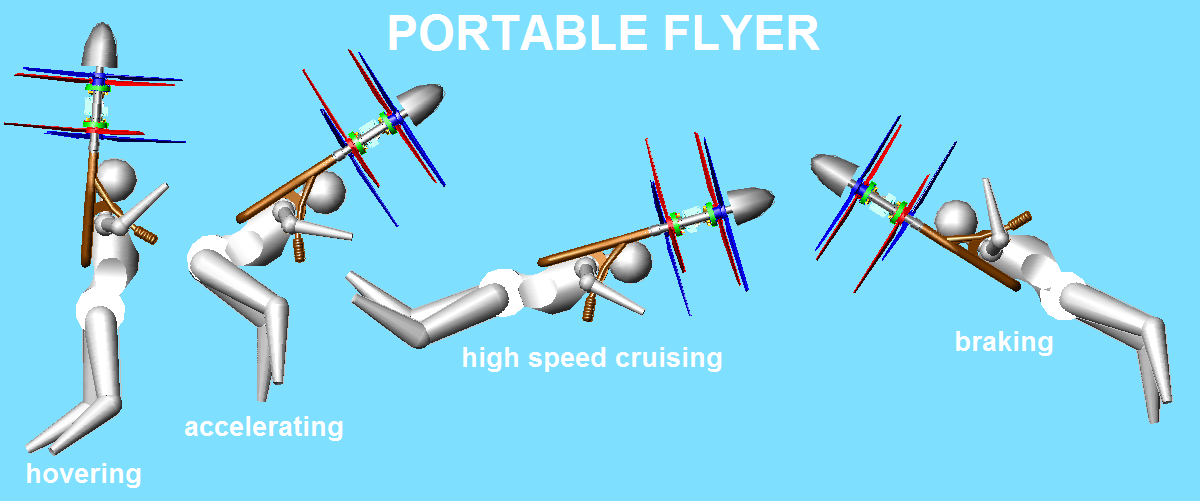
This is also what happens in the Portable Flyer or in the Broom version of it:
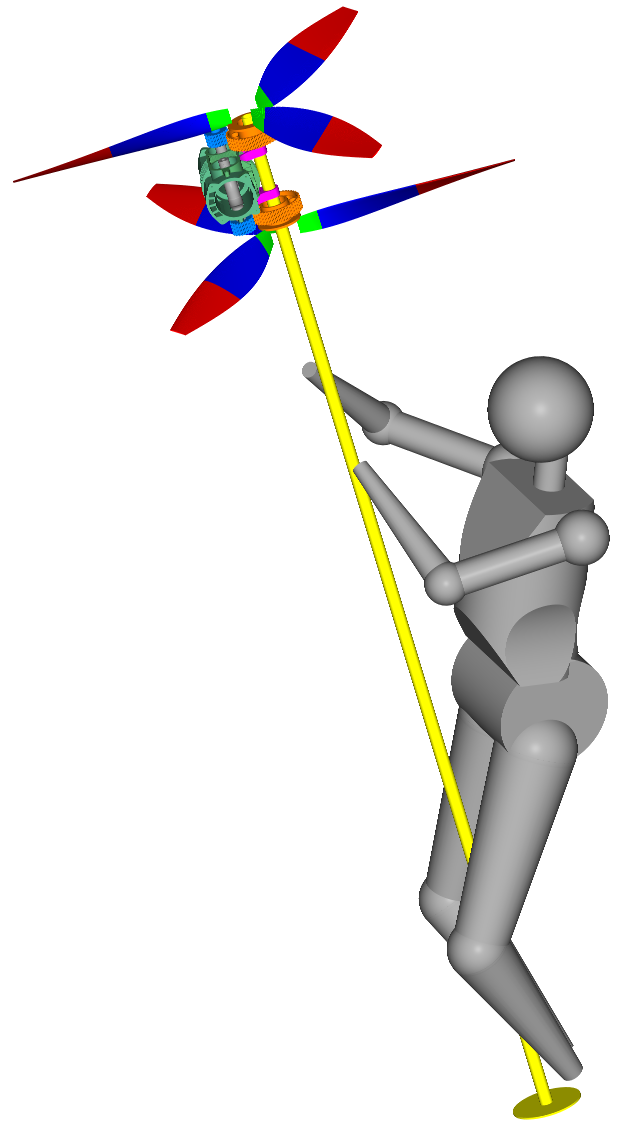
The rocket is the OPRE Tilting engine with the two coaxial-contra-rotating propellers it drives, while the body of the pilot is the “rest of the vehicle”.
The pilot feels (otoliths, eyes, skin etc) and displaces the thrust around the center of gravity.
But in this case the pilot, who is in the downstream of the propellers (from taking-off to landing), has aerodynamic control, too: by using his head / limbs as ailerons he can control all: pitch, row and yaw.
Thanks
Manolis Pattakos