You write:
“The portable flyer concept is perfectly controllable if provided with handlebars and a 2 DOF pivot (flexure perhaps?) at or above the pilot's shoulders. The end result is equivalent to the GEN H-4.”
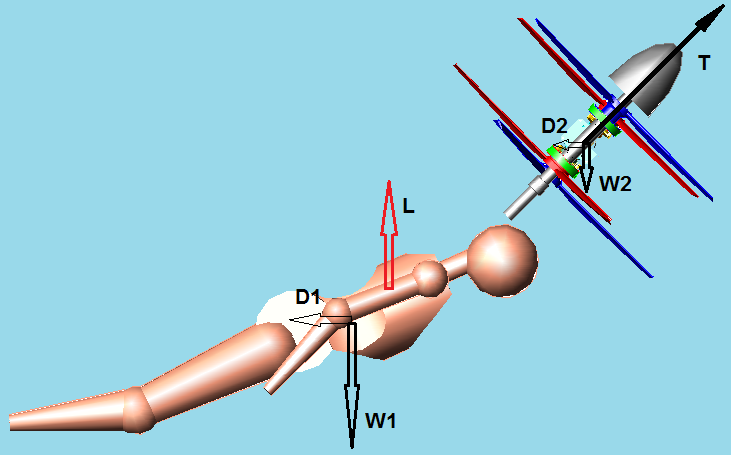
You cannot claim things like these, without providing “ “explanation, with force diagrams, as to how one transitions from . . ."
Seriously now
The handlebars are optional.
Think of a bicycle versus a unicycle: the one has handlebars, the other has not; the first is easier to drive, however the second is also controllable and drivable.
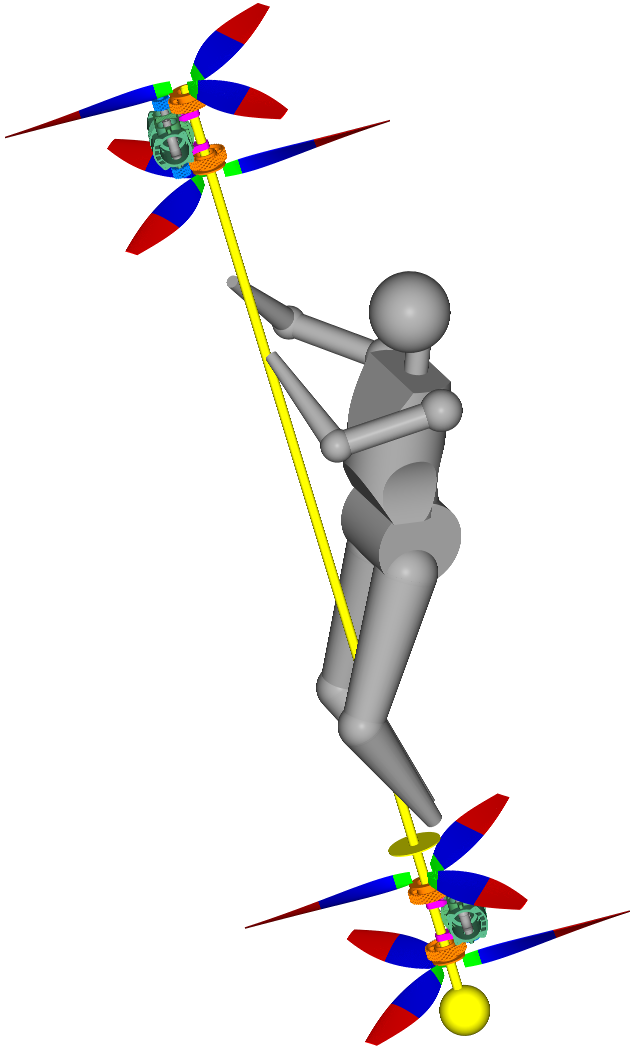
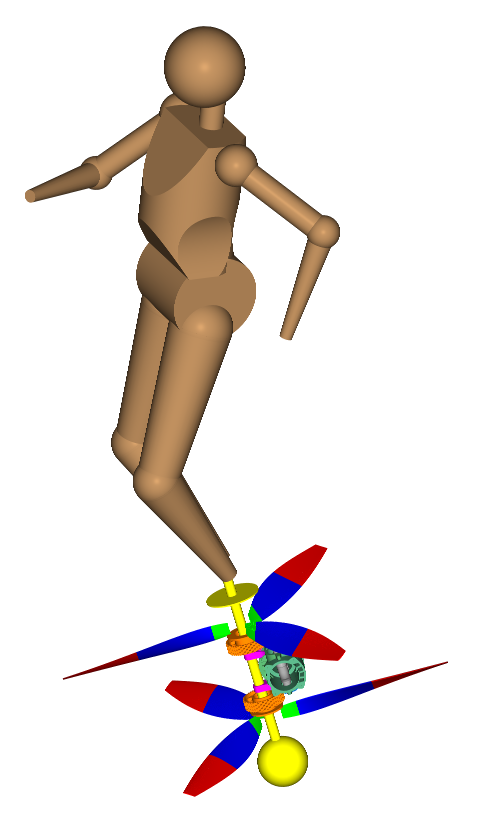
Portable Flyer with and without handlebars:
The hands of the pilot hold the handlebars; the hands are supported on pilots arms, which are supported on pilot’s “shoulders /upper-torso”. That is, every force and torque (pair of forces) provided by pilot’s hands come / originate from the “shoulders / upper-torso” (which, in turn, are supported on the rest body).
Either the Portable Flyer is vectored by the shoulders / upper-torso “assembly”, or by the hands (which are supported on the shoulders / upper-torso) holding the handlebars, is the same. The second may seem a little more easy / precise; however the first is also completely functional.
Differently:
Isn’t the “upper-torso / shoulders” assembly pivotally mounted, though a gimbal joint (the spinal cord) to the rest body?
Can’t every other part of the human body (I mean as mass / weight and as aerodynamic control surface) be widely displaced relative to the “upper-torso / shoulders”?
Equivalently, can’t the pilot displace the “upper torso / shoulders” relative to the rest body (limbs / head)?
If the objection has to do with the “height” of the “gimbal joint”, I would say that even if the gimbal joint were much lower (even under the feet of the pilot, say as in the Broom Flyer wherein the “gimbal joint” is just under the feet of the pilot) the Portable Flyer would still be controllable:
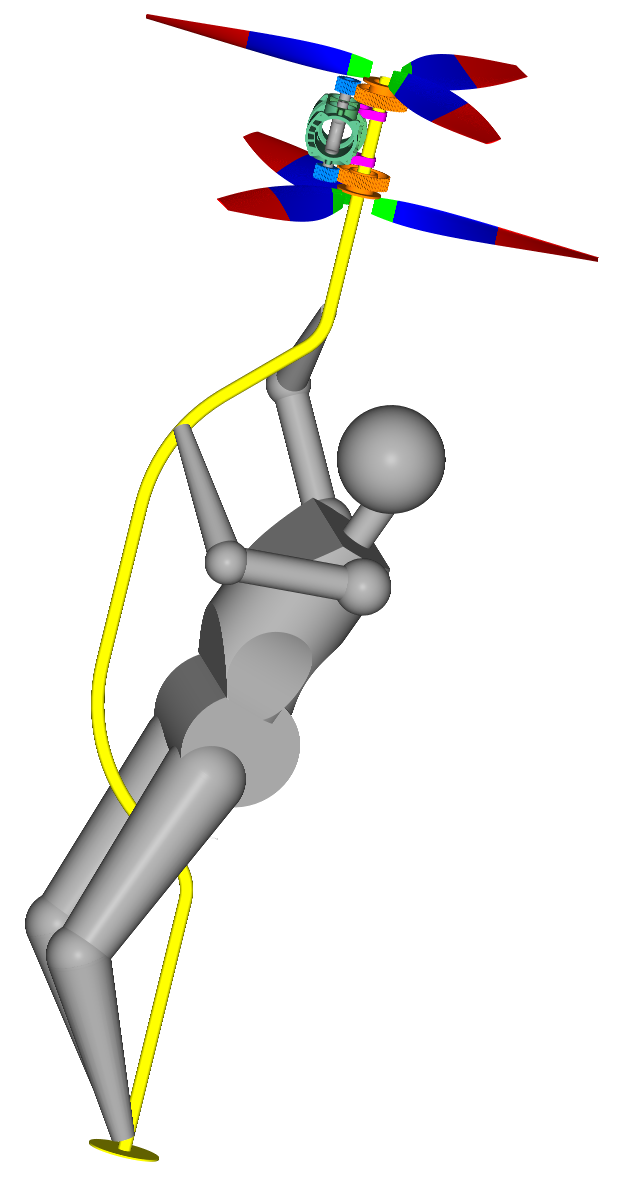
And if desirable, instead of holding the pile by the hands, the feet of the pilot can be secured at he bottom of the pile (as in Zapata’s JetPack)to make the re-vectoring of the thrust.
So, there is already a strong wide-angle gimbal joint (it is the spinal cord) and a strong part of the human body (the “shoulders / upper-torso” ”assembly”) where the Portable Flyer can be tightly secured.
The ordinary person can displace all the rest parts of their body relative to the “upper-torso / shoulders / Portable Flyer” assembly to control the flight (from vertical take-off, to hovering, to horizontal cruising, to high speed horizontal cruising, to braking, to hovering again and to vertical landing).
From yet another viewpoint:
Stand on the floor and bend to the left, then to the right, then forwards, then backwards. For how many degrees the average person can bend at all directions?
And why this is less than what is necessary to control the flight by “re-vectoring” the thrust?
If you combine the bending of the spinal cord with the numerous modes of bending of the legs / arms / head, then you have an “infinity” of poses that can be used to control the flight.
Or lie with the chest / torso on a chair, wearing a Portable Flyer (or an equal weight at equal eccentricity), and check how widely you can displace all your rest body parts.
At the end, what more a dragon fly (a libellula) does?
Its “propellers” are its four wings supported on its “torso”.
Its rest body cooperates and the libellula files better than anything else.
The Portable flyer is more than a GEN-H4.
The GEN-H4 is like the Broom Flyer.
The Portable Flyer can be regarded as two symmetrical (counter-rotating) small GEN-H4 connected together.
The GEN-H4 needs an electronically control brake for the control of the yaw.
The Portable Flyer has built-in aerodynamic control over the yaw (because the pilot is in the high speed downstream of the propellers).
The GEN-H4 is heavy and underpowered. It uses two big rotors. The disk loading is small. The rotors of the GEN-H4 are not for high speed flights. It is a small helicopter.
In comparison the Portable Flyer is like the OPSREY V22: capable for vertical take-off, hovering and landing, but also capable for high-speed cruising and aerobatics on the air.
As the following quote from the top of the page 208 says:
it is not a static equilibrium. It is a step (by step) dynamic correction of an instability.
- The runner actually rebounds (from foot to foot).
The equilibrium is dynamic:
the brain takes feedback from the body (eyes, otoliths, skin, etc) and locates instinctively the foot that is going to abut, and commands properly the muscles in order the body of the runner to take the “right” push from the ground.
it is not a static equilibrium. It is a step (by step) dynamic correction of an instability.
In comparison, the brain of the Portable Flyer pilot seems as having an EASIER job to perform.
For stability what is required is not a center of gravity above the support base, or under the aerodynamic lift, but a way to “feel and react to correct”.
Thanks
Manolis Pattakos