They say you cannot fight the laws of physics right...
What is the payload of a personal flying vehicle? Lets use 100kg...
Now.. What does a column of air of 100kg of thrust looks like? Depends on the cross section of it.
I see how crazy the down-wash is form the turbine jet suit. It is expected since those exhaust cone diameters are small so a very high velocity stream plus the entrained air means it blasts away anything near it!
Now for this 100kg of thrust in 4 foot circle, it is gonna be a hurricane under that thing.
My very rough calculation gives 30 m/s air velocity to get 1000N with the 4 foot diameter.
That's a 70 mph / 100 kph wind.
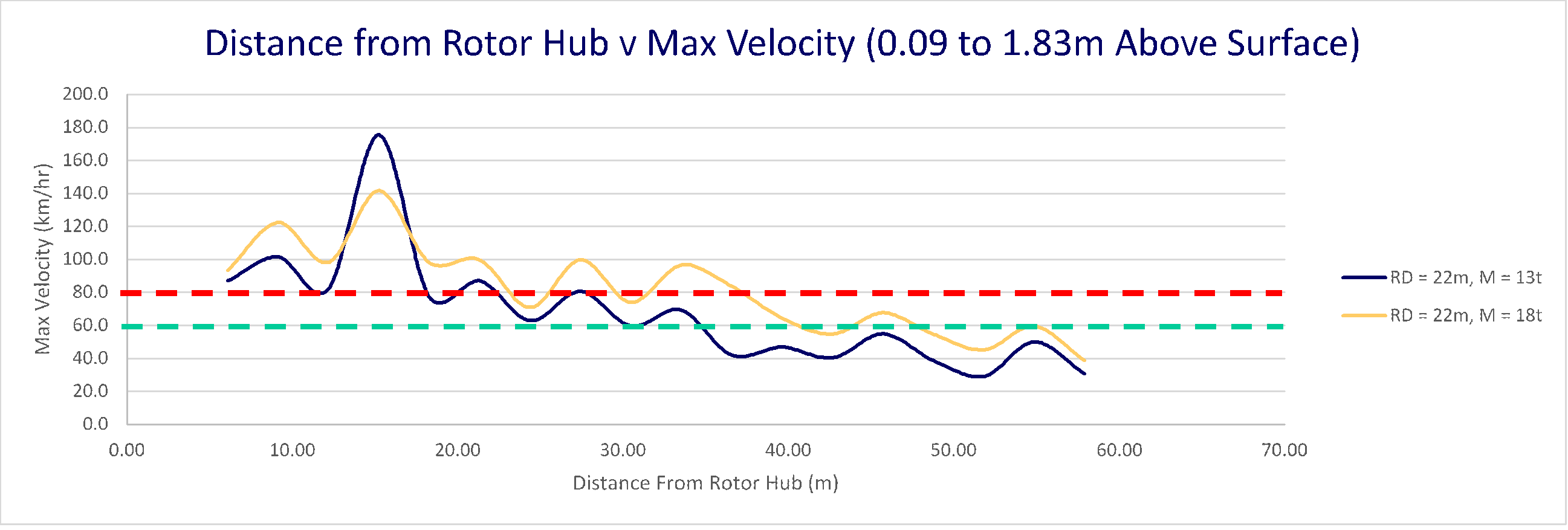
This is higher than the allowed wind speed for anyone near the vehicle. Using this chart below.. for a helicopter with 22m rotor, and a bit of fudging.. we can estimate that onlookers must stay back about 4 meters from the portable for safety during take off. God help the pilot though, he has no protection from that gale force.
You write: “Now for this 100kg of thrust in 4 foot circle, it is gonna be a hurricane under that thing.
My very rough calculation gives 30 m/s air velocity to get 1000N with the 4 foot diameter.
That's a 70 mph / 100 kph wind.”
Have you ever ride a motorcycle cruising at 100Km/h?
Or at 100mph (160Km/h) ?
Or at 150mph (240Km/h) ?
It is not a punishment.
The Harley Davidson riders:
may spend all day cruising at 80-100mph with their bodies’ long axes normal to the relative air wind.
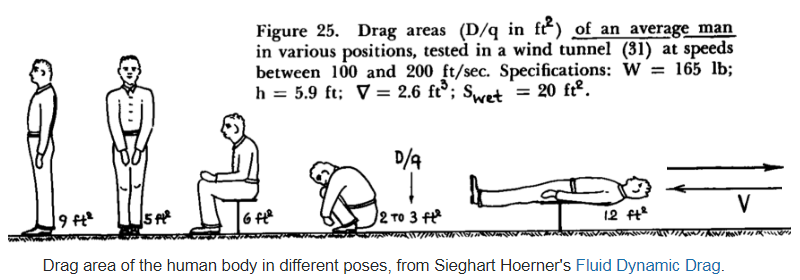
In the following image:
the third from left posture is more or less the posture of a Harley Davidson rider. The frontal area is 6ft2
The right posture shown is the posture of the Portable Flyer pilot in the downstream of the propellers (what matters is the relative speed of the air and pilot). The frontal area is 1.2ft2, i.e. 5 times smaller.
Based on the frontal areas, and supposing the drag coefficient is the same for the above two postures, the Portable Flyer pilot receives 5 times less drag force for a given air speed.
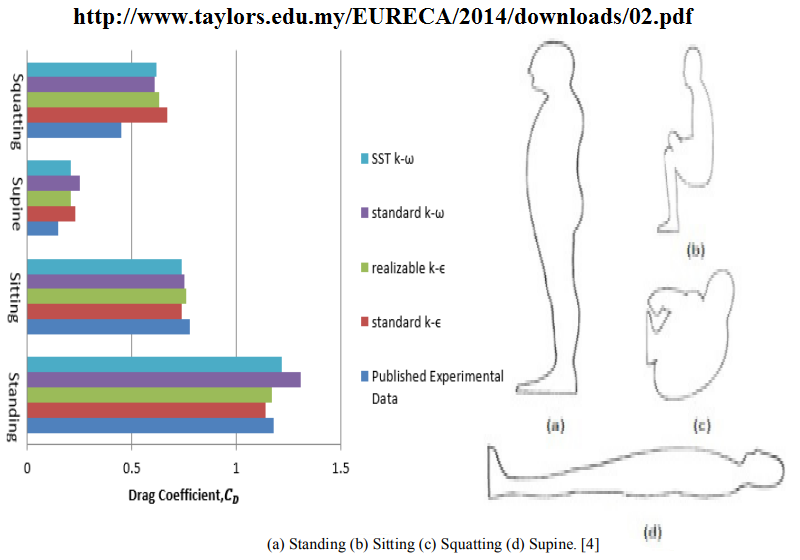
But the drag coefficient changes heavily with the body posture:
When a guy is driving a Harley (sitting posture) the aerodynamic drag coefficient is three times larger than when the same guy is driving the Portable Flyer (supine posture).
And because the drag force is linearly proportional to both, to the frontal are and to the aerodynamic drag coefficient, when riding the Harley at 100mph the guy receives 5*3 =15 times more air drag force than the air drag force his receives being inside the 100mph downstream of the propellers of the Portable Flyer.
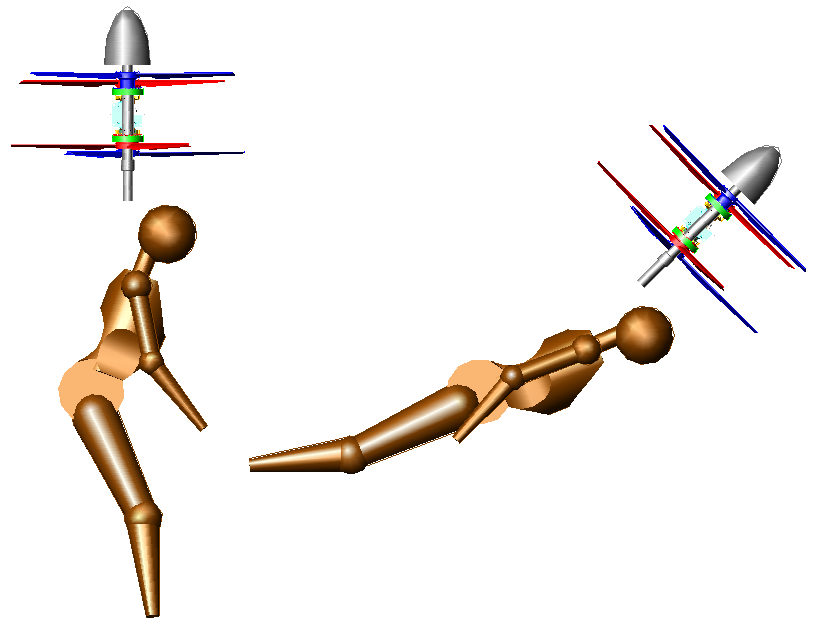
In the following image, at left it is shown a vertical take-off, or a vertical landing, or a hovering, at right it is shown a high speed cruising:
So:
if riding the Harley at 100mph, the drag force on the rider is 50Kg / 500N (this force (in N) multiplied by the speed (45m/sec) gives 22kW or 30bhp, which is the power consumed to move the rider alone, not the motorcycle),
then,
the drag force reduces 15 times (from 50Kg to 3.3Kg) when the same guy rides the Portable Flyer being into a 100mph downstream of the propellers.
Now think of a sport motorcycle cruising not at 100mph but at 150mph (240Km/h) with the rider suffering from the blasting air (we always talk for relative speeds: the air is standstill, the rider moves in the standstill air) and compare to the case wherein the same guy rides a Portable Flyer cruising at 150mph, with the pilot lying on an air mattress and receiving a more than ten times weaker drag force (above image, at right).
You also write: “we can estimate that onlookers must stay back about 4 meters from the portable for safety during take off. God help the pilot though, he has no protection from that gale force.”
As explained, the drag force on the pilot is several times weaker than what you think.
And why the onlookers to stay close to a Portable Flyer at take-off and landing?
You also write: “They say you cannot fight the laws of physics right...”
The good with the laws of physics is that they apply without exceptions.
According the physical laws:
When you take off with a fuel having low energy density, your range will be shorter. No exceptions.
The sooner one gets this simple thing, the better.
By the way,
as Zljrs wrote, he is a engineer.
and he is a “neighbor” of Uniflow.
He can easily explain to Uniflow why ethanol fuel is not a good choice for flying devices.
To put it simply:
If you ask Zapata to “cross” again (not cross, “cross”; real cross means without refueling) the English Channel with his JetPack, but this time using ethanol as fuel, he would ask for one or two additional refueling stops (to cover the 22miles of distance).
This is what the physical laws command, even “If you live in America and have the most expensive lawyers”.
Oh come on manolis, the point is that the wind forces will be greater than the ability of a human to hold their legs, arms, whatever in the airstream and guide the 'flyer' in any sort of controlled way. Flailing arms and legs do not equal control inputs but rather the opposite. Again, I suggest you build a model and test it. Is this so hard? If you're right then great, but if you're not then..... not so great. This is pretty basic stuff. Yeah, I expect more pictures and word salad.....
Oh come on manolis, the point is that the wind forces will be greater than the ability of a human to hold their legs, arms, whatever in the airstream and guide the 'flyer' in any sort of controlled way. Flailing arms and legs do not equal control inputs but rather the opposite. Again, I suggest you build a model and test it. Is this so hard? If you're right then great, but if you're not then..... not so great. This is pretty basic stuff. Yeah, I expect more pictures and word salad.....
I think this is right. I'm not a biker, but I suspect that the front wheel, bars etc deflect air flow fairly significantly so the equivalent wind speed hitting the rider is well below the forward velocity of the bike, even without a screen.
However wingsuit pilots are probably a better analogous example of airflow experience and body control of flight.
Manolis have you calculated the distance travelled between the point of initiating braking whilst travelling forwards at full speed and coming to zero airspeed? I think your vmax was 200mph, c 66m/s iirc. How long do you think it will take for your pilot to transition to flying feet first into this airflow and how long for the pf reverse thrust to decelerate? What is the mechanism to maintain stable lift during this transition?
Do you think there will be a minimum flight altitude for the pf? I can see the braking makeover described above taking well over 10s, during which time I think you will have pretty much zero (maybe even negative) aerodynamic lift. What kind of altitude loss have you calculated during this manouver and will this require an operating floor?
See in the video how easily Yves Rossy moves his arms, hands, legs and head to steer, when he flies at high speeds.
His limbs / head move at 200-300Km/h in the air.
The same physical laws apply for Rossy's DeltaWing JetPack and for the Portable Flyer.
The forces on Rossy's limbs / head and on the limbs / head of the pilot of the Portable Flyer obey the same physical laws.
It is easy to check by yourself the direction and strength of the aerodynamic forces: when you are in a car cruising at 100mph, open the window, put your hand in the air and play with its position / orientation.
Quote from page 178:
Please see the video of Yves Rossy flying above Dubai:
The control of his flight is as fine as it gets. It is a perfect control.
Please see how he flies upside down and how he rolls back (from 2:49 to 2:53 in the video).
His Delta Wing is fixed (no flaps, no ailerons) and is secured on his back (with the four jet turbines fixed onto the Delta wing).
With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators.
"You feel very well, you feel the pressure," Rossy says, "you just have to wake up these senses. Inside an airplane we delegate that to instruments. So we are not awake with our body."
As Rossy says :
"I am the fuselage, and the steering controls are my hands, head and legs".
In order Rossy to control his flight by his head / limbs, he needs a minimum velocity (say, 100mph) relative to the surrounding air.
Instead, the head and limbs of the Portable Flyer pilot are from the very begining (take off) to the end of the flight (landing) inside the high speed downwash of the rotors.
End of Quote.
Hello Rodak.
Sorry for my "English salad", as you call it.
You are the only one who complains (I am sure there are more).
However this open discussion is not about the proper use of the English language, but about engines, 2-stroke engines and flying devices.
So, please focus on the "substance" and comment with technical arguments, if you have any.
Your "built one and test it" is not a technical argument.
I guess I am an idiot then, lower fuel energy density, less duration, who would have thought
You think I dont know this, my gyro will fly three hours on a tank full of fuel, Im more than happy to accept a quarter to a third less duration to run an alturnative, renewable fuel. Thats still two hours, thats a lot of flying. Even running this 'low density' fuel my gyro will still kick the ass of an electric alternative. As its my aircraft, my fueling decision, Ill run what I want not what some guy on a forum thinks I should do because he doesn't want to know any better.
Last edited by uniflow on 19 Sep 2020, 10:09, edited 1 time in total.
Word salad describes your verbose use of rediculous analogies and comparisons instead of calculations, modeling or experiments.
I think you know this by the way, you always dodge the question. I don't think you have said anything new about the PF in about 30 pages, it's just regurgitating the same "human brain is magic at control" and "pendulum rocket fallacy".
At every opportunity you assume we do not understand you, when in fact we all do perfectly. Your explanations with reference to birds and babies, other flyers are all very simple to understand.
Do you understand that we just do not agree with you, not due to misunderstanding your flyer but because of our skills and experience. With respect to controllability and stability, we do not believe your assessments about your flying machine.
as Zljrs wrote, he is a engineer.
and he is a “neighbor” of Uniflow.
He can easily explain to Uniflow why ethanol fuel is not a good choice for flying devices.
Your fixation with every conversation being a debate that you must win, is why I do not need to explain anything to uniflow. Considered across the totality of his craft flight envelope, engine performance, and other real world tradeoffs, it's evident that ethanol works for him and has been real world validated and flight tested.
This is yet another example of where you assume people who disagree with you "do not understand" something, instead of merely disagree with you about it.
See in the video how easily Yves Rossy moves his arms, hands, legs and head to steer, when he flies at high speeds.
Your "built one and test it" is not a technical argument.
Thanks
Manolis Pattakos
Thanks Manolis, I understand you are focussed on technical arguments rather than anecdote. This is why I am interested to understand you calculations of the distance travel and lift during transition from 67m/s forward travel to hover. Could you help me understand your flight dynamics by showing your calculations mentioned above rather than showing videos of something entirely unrelated?
“At every opportunity you assume we do not understand you, when in fact we all do perfectly. Your explanations with reference to birds and babies, other flyers are all very simple to understand. Do you understand that we just do not agree with you, not due to misunderstanding your flyer but because of our skills and experience. With respect to controllability and stability, we do not believe your assessments about your flying machine.”
It seems you think you talk in behalf of all forum members.
From when?
Here is a quote from a private message from an active member of this forum:
I have followed over the years your various ingenious designs of engines, variable speed drives and shaft couplings. The gestation process of the OPRE engine you have documented each step of the way. Now you are making a batch of 10 of them so this is a big step forward.
I have a friend who is very keen on helicopters and started to learn to fly a small gyrocopter but had to drop out of it due to both time & money constraints. I linked him to the thread & warned him that he would be unable to resist. He can't and will be in the queue to buy one.
Your intention to do the flight of Icarus will really put you on the map when that is done. A huge advance over crossing the channel or circling around in front of the Sydney Opera House.
. . .
I am just putting a suggestion to you. Something that flies just as beautifully as your portable flyer. I also take this opportunity to record how fascinated I have been by this project of yours and I am confident it is going to be ground breaking and relegate the jet alternatives to a side show. You have been very patient, polite and thorough in your responses to those who have reservations about this project.
You also write:
“it's evident that ethanol works for him and has been real world validated and flight tested.”
What is not evident is the advantages of the ethanol as compared to petrol (gasolie) and Diesel fuels.
Uniflow can burn gasoline in his gyroplane and use the ethanol in his car or bike.
It doesn’t matter, at all, what he will choose.
What does matter is the reasoning behind his choice.
RON’s engine started off as what is termed a Tandem Twin with two single cylinders mounted on separate cranks arranged back to back using twin rotary valve induction.
This is a favourite layout for many road race engines.
I wanted a short engine and this setup was short, being the length of only one crankshaft.
Both cranks were connected with a single larger diameter gear between them, this also serving as the reduction to the propeller.
All seemed well for the first few ground runs then disaster struck; broken crank gears. Six different styles of gearbox all had the same outcome so I reluctantly shelved that design.
Not to give up so easily, I decided to build a Parallel Twin two-stroke (like a Rotax) but with crankcase reed induction instead of rotary valve this time - reeds being most commonly used in almost all modern two-stroke dirt bike engines.
This engine used the same cylinders (recycled from the previous engine), same pistons, rods, carburettors and starter.
A new crank was built but in an effort to keep the engine short I again ran the output drive off the middle of the engine, putting the propeller flange just past the rear cylinder.
This engine suffered typical parallel twin type vibration, i.e. quite bad. I tried to fix it with changing the crankshaft balance factor but all that did was to relocate the bad vibration elsewhere within the operating rpm range.
I knew this might happen, and in fact it only took 15 minutes of run time to start cracking the exhausts.
I pushed RON back into the corner of the workshop and that was that for about a year.
I had been considering using a counterrotating balance shaft but I didn’t want the extra weight.
What to do however?, as without this shaft the vibration was a show stopper.
One Sunday afternoon (several actually) I built a balance shaft and bolted it up externally to the engine as a test - with counter rotating bob weights flying around in mid-air. The difference was like night and day! I could not believe how smooth this new addition made the engine feel.
I shortly came to the conclusion that the balance shaft would double very nicely as the pre-rotator drive output, and suddenly the balance shaft was not such a bad thing to have after all.”
Weight of the engine?
Capacity?
I see several reliability issues related with the vibrations.
If you add a balance shaft in a two-cylinder in-line two-stroke engine (for even firing and easier balancing it requires crankpins at 180 degrees) then “the difference is like night and day!” as you write.
Actually the above two-stroke with the balance shaft is as vibration free as a typical in-line 4-stroke 4-cylinder (most cars have such engines).
When the in-line 4-stroke 4-cylinder is compared with a six in-lines, “the difference is like night and day!” (you can read several articles in the Internet, wherein the same car is powered by a straight four and by a straight six and is driven by the same journalist).
The single cylinder OPRE Tilting of the Portable Flyer is more vibration free than the best six cylinder engines. With zero phase difference between its crankshaft, the proper selection of its balance webs gives perfect vibration-free quality.
The absence of vibrations (and of reaction moment due to the symmetrical load) allows the direct support of the engines on pilot’s back / torso, making the overall structure more lightweight
For Personal Flying Devices the lightweight is more than crucial.
Take the Martin JetPack.
Martin had a good initial idea.
But then he started adding things, several things.
Finally he ended up with an extremely heavy Personal Flying Device
Go at 4:25. Empty weight 295Kg.
In order to make a, say, 75Kg person to fly, we have to lift in the air 400Kg!
The most successful thing Martin did, was that he sold the Martin JetPack project to some Chinese investors.
Then Martin participated in the GoFly Boeing contest.
Compare Martin's 300Kg JetPack with Zapata's 20Kg JetPack. It is like the day with the night!
What I say is that the more lightweight a Flying Device can be (and the more lightweight its fuel) the better.
You write: "Thanks Manolis, I understand you are focussed on technical arguments rather than anecdote. This is why I am interested to understand you calculations of the distance travel and lift during transition from 67m/s forward travel to hover. Could you help me understand your flight dynamics by showing your calculations mentioned above rather than showing videos of something entirely unrelated?"
The post you refer to (and the video with Rossy controlling his flight by his head / limbs) was not for you, but for Rodak (see his posts above yours).
The following video is entirely related with your question:
Quote from page 178:
See in the following video, from 1':52'' to 2':02'', Fraky Zapata accelerating and then decelerating with his FlyBoard Air.
To accelerate, Zapata leans forwards, so that the exhaust gas from his jet turbines exits downwards - backwards pushing him upwards - forwards.
To decelerate / brake, Zapata leans backwards, so that the exhaust gas from his jet turbines exits downwards - forwards pushing him upwards - backwards.
Similarly to Zapata:
In order to accelerate towards a direction, the pilot / rider of the Portable Flyer leans towards that direction: the rotors provide an upwards force that takes the weight of the pilot / Flyer, and a horizontal force that accelerates the pilot / Flyer towards the selected direction.
In order to decelerate, the pilot /rider of the Portable Flyer leans backwards: now the rotors provide an upwards force that takes the weight of the pilot / Flyer, and a backwards force that decelerates the Flyer."
And here are some rough calculations:
With both engines running, you can have an upwards acceleration of 1g, or a horizontal acceleration - deceleration of 2g.
If you are at a low altitude you have to use a part of the power (propeller axis at an angle from horizon) to keep your height unchanged, so suppose only 1g (10 m/sec2) deceleration.
This means that from the 66m/sec (200Km/h) you need 6.6seconds (v=a*t, i.e. t=v/a, wherein v is the velocity, a is the deceleration and t is the time) to stop (to hover), and the distance covered will be s=(1/2)*a*t2 = 220m .
If you add the aerodynamic drag to the braking force from the propellers the above numbers drop further.
In order to decelerate, the pilot /rider of the Portable Flyer leans backwards: now the rotors provide an upwards force that takes the weight of the pilot / Flyer, and a backwards force that decelerates the Flyer." [/list]
Manolis, one of the specifics of Zapatas fly board is this.
Triple redundant flight controls - two wired systems, plus one wireless backup system.
Zapata doesn't fly this thing with moving around his center of gravity alone, because that wouldn't work. Normally if he would lean forward, he would simply fall over. The board has a Fly-by-wire system for autonomous stabilization.
Hello,
Maybe this is an better design, for a jetpack,more fuel efficient a continuous blade compressor, some sort of a hybrid between centrifugal and axial.

 .
.