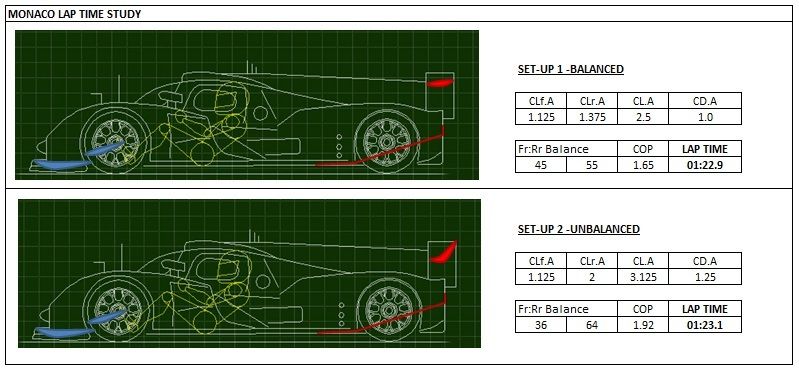
Richard provided charts prior to each race last year. This year we are trying something a little different. The charts will not be released to reduce the gap between those with access to a lot of computational resources and those with a more limited access. Having access to these charts provides a way to optimise the design to the optimum point given by the chart if you have access to enough computational power. Our intention, by not releasing the charts, is to reduce some of this competitive advantage.machin wrote:I can confirm 45:55 front to rear weight distribution, So you should be aiming for the same aero balance. I'll get some aero vs lap time charts sorted out over the weekend.
The other changes that we are introducing relates to the weight distribution and aero-balance. The aero-balance is a very sensitive factor, which also requires a lot a CFD modelling to get it "just right". We will introduce a correction to the predicted COP to reduce the gap between the predicted COP and optimum COP to reduce the sensitivity of the aero-balance. The correction factor is not yet fully finalised but we are currently leaning towards a 0.5 weighting factor: the COP used in VirtualStopwatch is 0.5 * predicted COP + 0.5 * optimum COP. So there is still a big incentive in getting the COP close to the optimum, but the competitive gain from it is reduced. We are aiming at finalising this next week and incorporate the "KVRC corrected COP" in the OCCFD output for clarity.