Hello Tok-Tokkie and thanks.
The emergency parachute is a reasonable solution.
Yves Rossy uses a parachute at every landing.
(do see the video:
[youtube]
http://www.youtube.com/watch?v=Czy0pXRRZcs[/youtube]
and focus on the perfect flight-control he and his partner achieve using exclusively their bodies)
Another solution is to fly near the ground.
Imagine flying from island to island of the Aegean Sea, just 3 meters (10 ft) above the sea level.
Another solution is to take-off and land as an airplane:
all you need is three wheels and a wing-suit.
In this case a significant horizontal speed is required (say 160Km/h, 100mph) during take-off and landing, just like in a normal airplane.
Being at a small altitude (say lower than 100m, 300ft), the pilot lands exploiting his horizontal speed.
What if the Portable Flyer hovers (zero horizontal speed) at a high altitude?
Being at a high altitude, the pilot exploits the gravity to gather speed (think: the dynamic energy of a mass at 100m altitude equals with its kinetic energy in case it moves with 160Km/h or 100mph; differently speaking: without aerodynamic resistance, if you leave an object from 100m height, it hits the ground with 160Km/h, 100mph).
As the Portable Flyer approached the ground. the pilot turns the flight to almost horizontal flight and lands.
Worth to mention here that the Osprey cannot autorotate safely; in case both engines stop (say, after running out of fuel), or in case the one engine stops and the transmission system is inoperable, or in case a propeller is destroyed, the Osprey does an emergency landing as any normal airplane.
Another solution is a secondary (emergency) engine-propellers set, operating only at small altitudes. In case the main engine fails, the landing is still safe.
AUTO-ROTATION
For auto-rotation you need bigger/heavier propellers and pitch control.
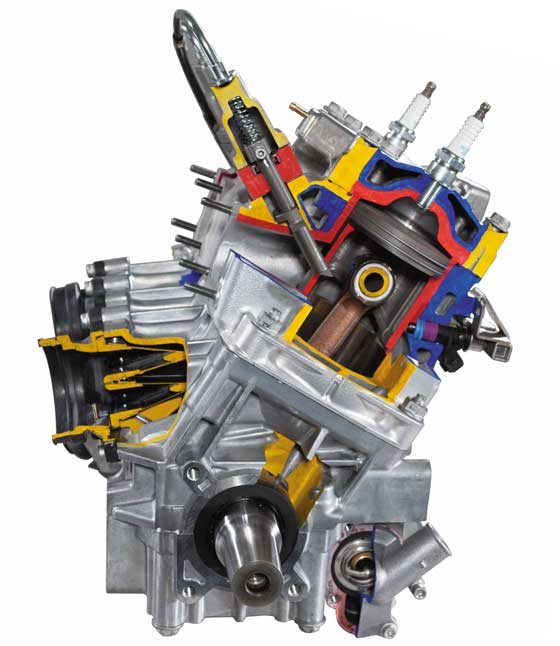
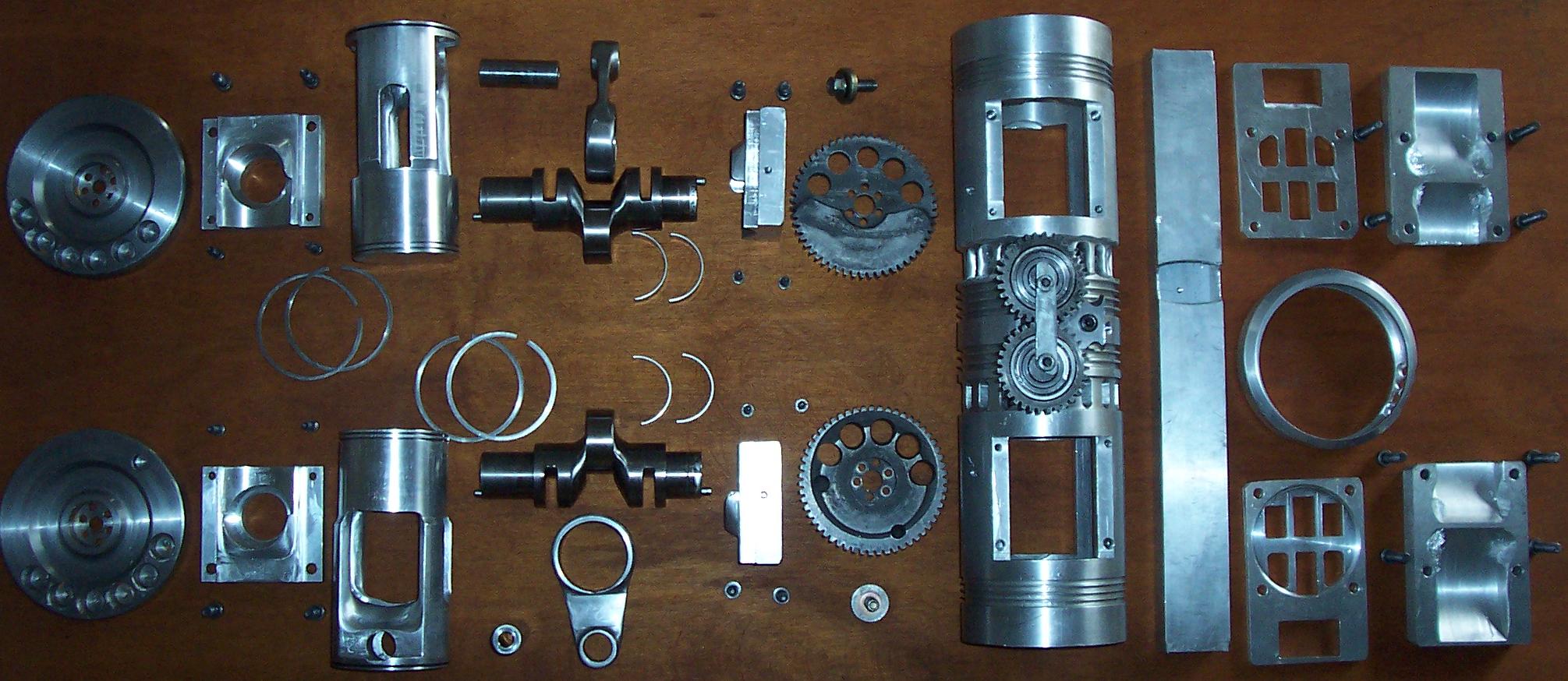
Suppose you have a Portable Flyer based on the compact OPRE Tilting engine, like:
(more at
http://www.pattakon.com/pattakonTilting.htm )
With the two propellers at slightly different height (say 5cm / 2in) to avoid collision in case of desynchronization) and with free-wheel mechanisms and pitch control, you have auto-rotation.
If the engine stops at small height, the propellers continue to rotate for an emergency landing.
If the engine stops at a big altitude, the pilot selects the proper pitch to accelerate the rotation of the propellers during the fall. At the right altitude the pilot changes the pitch, uses the energy stored in the two propellers and lands safely (as a helicopter).
PS.
The engine shown in your post is the PatATi prototype, which is rid of reed valves.
The following OPRE Diesel uses reed valves:
[youtube]
http://www.youtube.com/watch?v=64TY-x2Cj6Y[/youtube]
The distance of the two crankshafts does not limit the diameter of the propellers.
With big propellers, pitch control and a free-wheel between each propeller and its mate crankshaft, a “Portable Flyer” based on this arrangement can auto-rotate.
Thanks
Manolis Pattakos