I've had a gravity racer project on the go for quite some time - I posted about it here:
https://www.f1technical.net/forum/viewt ... 14&t=25410
I'm currently looking into the possibility of using what are essentially skateboard wheels, but the larger longboard variants, with 70mm diameter being a common size.
As all skateboard/longboard/street luge vehicles use traditions skateboard trucks to provide steering, there aren't any readily available parts to run skateboard wheels on "kart" style stub axles, which is kinds what I want to do.
Anyway, this got me thinking about steering geometry for wheels that are essentially solid, and for where the contact patch will only be a few mm front-to back, on a wheel that is 51mm wide.
To my thinking, this means that the front wheels must remain on the same horizontal plane during steering - so that all four of the wheels stay flat and in contact with the ground. Does that sound reasonable?
Assuming it does, I then began to wonder how i could build in some kind of self-centering stability when castor is out of the question, and the answer to me seemed to be mechanical trail, where the axle for the steering front wheels is mounted behind the kingpin. I've been dabbling with tinkerCAD (no laughing at the back):
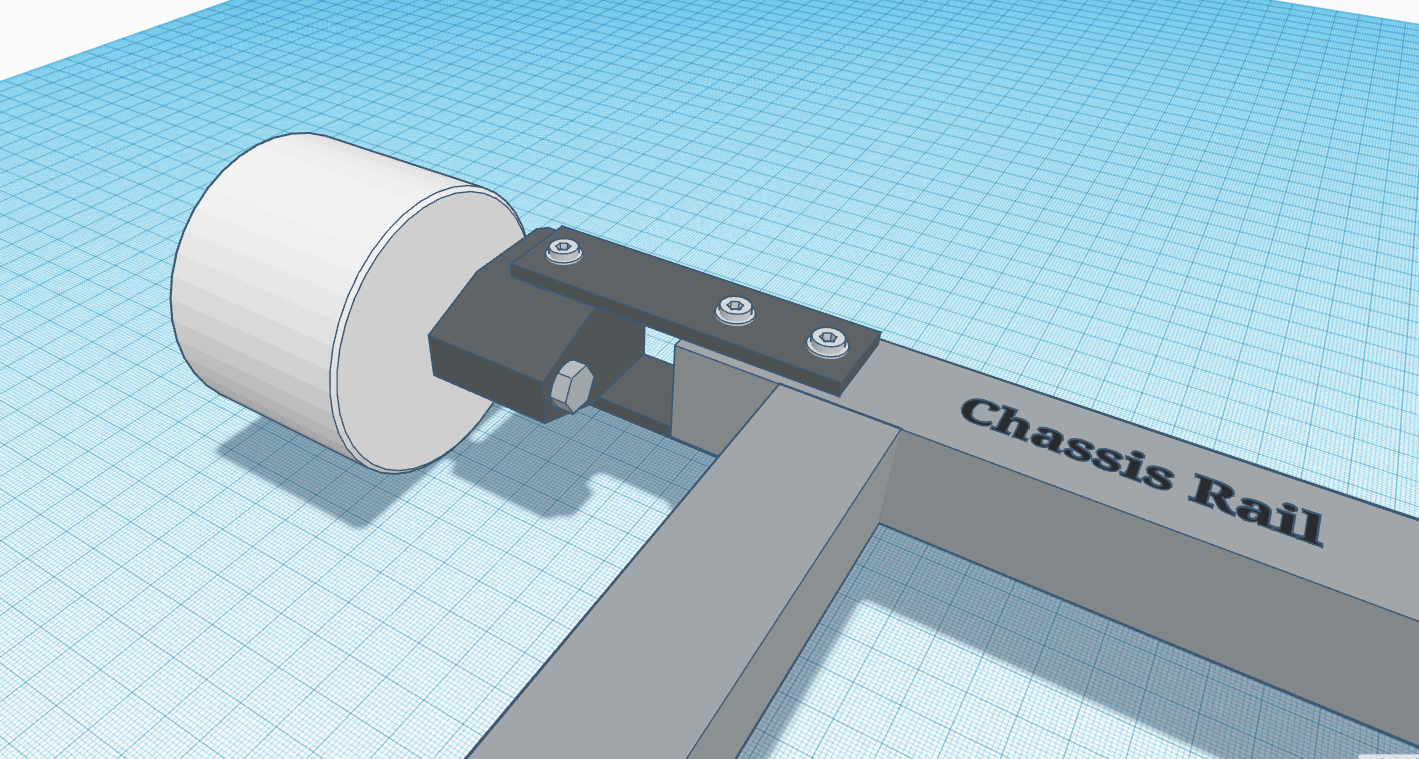
Obviously there's no steering connections there as yet, but assuming accurate Ackerman angle, I'm not too worried about that at this stage. Whaddya all think?
Cheers,
Jim
