Hi Manolis, maybe an rc model with servos shifting the weight for control to prove weight shifting theory? I believe your resolve to weight shift control but spinning propellors are my grave concern from a safety standpoint, if you land fast and cant keep up, a tumble may occur, serious injury will happen.
Prove the weight shift and you will silence your critics, but please do be very careful.
True. Still, increase the wind tunnel speed and decrease the angle; nothing new here. It's interesting that this person is being held up by kite lift, not aerodynamic lift. manolis insists his machine will use the human body as a wing to produce lift but the reality is any lift will be kite. Long, long ago on the thread we talked about power requirements for lift as the angle of flight decreased. I like to look at things in a calculus sort of way, one extreme and then the other; the actuality is usually somewhere in between. As manolis' flyer approaches horizontal flight the component of lift provided by the motor decreases with a sine function; flying totally horizontally the lift component from the motor is zero and if the Bernoulli lift is zero the flyer will simply descend to the ground. manolis has not demonstrated nor quantified the lift component from a trailing human body and I think this is a serious mistake. In honor of manolis' constant theme of showing pictures, etc, here's what happens when you lose lift.... https://youtu.be/0HJ4z1jGEcA
C'mon now Rodak, that vid of a massive Stratofortress tragically exceeding its flight envelope
is in - no way - a reasonable example, try one which shows prop-flight with power-to-weight
exceeding unity in available thrust, (inc' manoeuvre techniques), such as shown here below:
"Well, we knocked the bastard off!"
Ed Hilary on being 1st to top Mt Everest,
(& 1st to do a surface traverse across Antarctica,
in good Kiwi style - riding a Massey Ferguson farm
tractor - with a few extemporised mod's to hack the task).
C'mon now Rodak, that vid of a massive Stratofortress......
Oh come on J.A.W., can't you pick up on a bit of ribbing? Of course the video was not a serious comment. I lived sort of near the accident scene and was shocked by the irresponsibility of the pilot to needlessly take the lives of his crew and himself. He was a known cowboy and had issues prior to the accident. What did he expect, banked at 90°? No lift and gravity took over......
It would be even easier to control, and more efficient at hovering, if the model airplane had contra-rotating or counter-rotating propellers, say like the 2-seater POGO_Flyer design:
or like the Convair Pogo XFY-1 (fly tests 65 years ago, no electronics at all, pure manual control):
Quote from the above video:
The Convair XFY Pogo tailsitter was an experiment in vertical takeoff and landing. The Pogo had delta wings and three-bladed contra-rotating propellers powered by a 5,500 hp Allison YT40-A-16 turboprop engine. It was intended to be a high-performance fighter aircraft capable of operating from small warships. Landing the XFY-1 was difficult as the pilot had to look over his shoulder while carefully working the throttle to land.
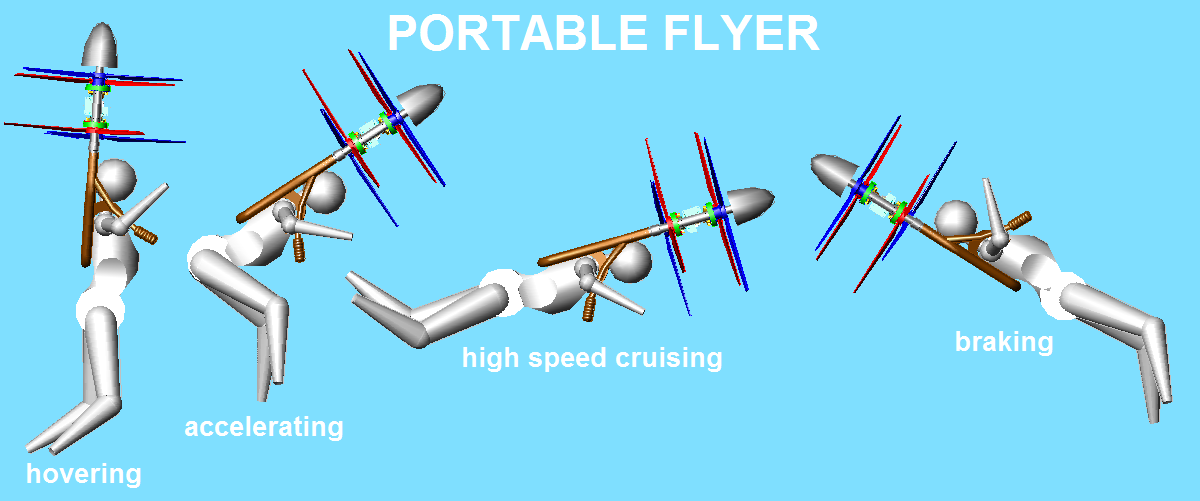
PORTABLE FLYER:
The compactness (small area exposed to the blowing wind) together with the lightweight and the adaptability of the legs / feet to any roughness of the landing ground, improve the safety and allow landings even on a rock.
As you say - it is not stable - but it does have a "stability advantage". This makes it more controllable - as do the handlebars located below the hinge.
But, does the “pivot below CG” really have a “stability advantage”?
Case of high speed cruise.
I have focused on hover stability/controllability for an obvious reason.
You cannot run before you have learned to walk.
You don't get to "cruise" if you can't hover.
“You cannot run before you have learned to walk.
You don't get to "cruise" if you can't hover.”
I agree.
However, Yves Rossy was cruising and making aerobatics several years before he could “hover”.
You also write / wrote:
“I have focused on hover stability/controllability “.
and
“(July, 1, 2020): Comparing the "above CG" pivot to "below CG" (imagine the "hinge" is locked), the latter has a stability advantage because it tends to rotate the thrust vector towards vertical, opposing the lateral acceleration.”
I disagree.
And I asked you for more persuasive arguments than an “instant” FBD.
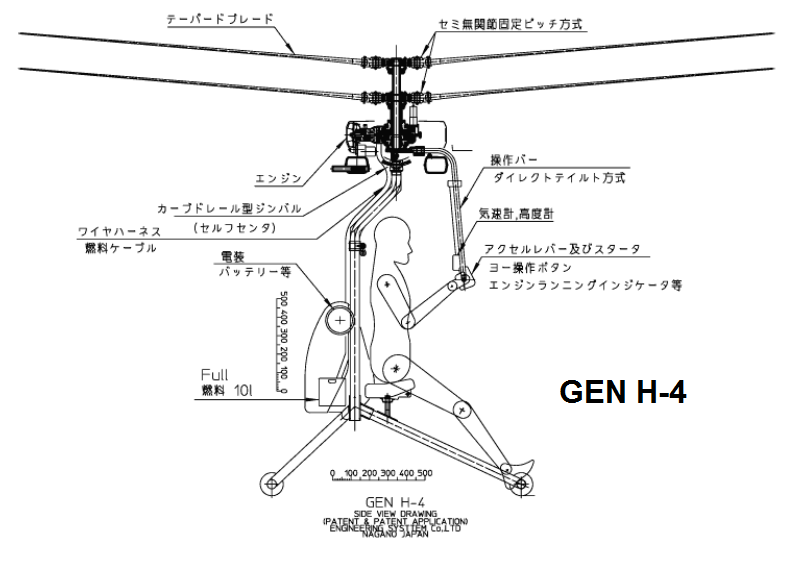
Forget the theoretical discussion and consider what happens in practice with the GEN-H4:
Isn’t the pivot of the GEN-H4 substantially above its overall center of gravity?
Isn’t the GEN-H4 “perfectly” stable / controllable at hovering?
What differs the Portable Flyer (with or without handlebars) from the GEN-H4?
Actually they differ: the first can be considered as a more lightweight, a more compact and a more symmetricall version of the latter, characteristics that make it even more stable and even more controllable at hovering.
By the way, in the following video of the first flight of the POGO Convair XFY-1, the volunteer pilot talks and explains a lot:
Manolis, the more you fixate on how FBDs are too limited to be applied in the real world, the more it shows you do not know how to, and do not want to perform control analysis, or any dynamic analysis really. They are a single step in the rigorous analysis serious people perform on dynamical systems - especially those that will fly. I've really tried to be charitable here, but this is ridiculous.
Hi Manolis, maybe an rc model with servos shifting the weight for control to prove weight shifting theory? I believe your resolve to weight shift control but spinning propellors are my grave concern from a safety standpoint, if you land fast and cant keep up, a tumble may occur, serious injury will happen.
Prove the weight shift and you will silence your critics, but please do be very careful.
Hello J.A.W.
Nice / explanatory video.
It would be even easier to control, and more efficient at hovering, if the model airplane had contra-rotating or counter-rotating propellers, say like the 2-seater POGO_Flyer design:
Lol, I would have bet my house that the think manolis would have chosen to take from your example of a model to test controllability is that it would have performed better using his PF design
Reading manolis for a couple of years, and also reading his posts on the other forum he has archived show that he is never actually going to fly his personal fliers, either as models or a full sized vehicles. He has been posting animal pictures for enough years now that it demonstrates his unwillingness to do anything else.
For general interest (TC you will love this), I did find this absolutely beautiful document on the used of scaled models for stability and controllability testing. It includes photos of several iconic flight craft, including the XFY-1 and P.1127!!
manolis, build a physical model if that is more suited to your skills than computational modelling. While there are no pictures of animals in the NASA report, it does demonstrate the scale models are useful steps in ensuring stability and controllability of flight craft.
I did try to steer the topic towards rc bicopters as it had all the answers to flight control, its an intuitive process being played out for all to admire or to ridicule. I have a freind who can play 'bohemian rhapsody' by ear but cant read a note of music, similar process here, its interesting to watch.
don't R/C bicopters etc have active stabilisation via 3d accelerometer arrays ?
not intuitive anything
https://www.jstor.org/stable/44725614/seq=1 yields Chana & Colman's report on the XFY-1
afaik
in de-transition (now called conversion eg in Osprey lingo) the XFY-1 had uncontained-ascent height issues (as the PF would)
as the minimum power in flight was maybe 1500 hp
so typically the conversion to hover started 800 - 1000 ft too high
(given that descent rates above 10 ft/s were disastrous as stability/controllability fails when flying backwards) ....
the real issue was that 1000 ft at 10 ft/s was too long at desperately high piloting work-rates and fuel-guzzling rates
Colman said it wasn't a view issue
there was only 1 hover-cleared engine (none for Lockheed) and it had 5 hour teardowns
the XFV-1 made 6 transition flights totalling 2 hr 21 mins
conventional airplane 'hover' ?
the R/C plane tutor footage seems to show at height the body attitude of 10 or 15 deg from the vertical ...
as mentioned earlier I have flown 3 types of real aerobatic aircraft in 'hover' at height ....
consider the horizontal components of the thrust vector and the wing 'lift' vector ....
about half the wing is blasted with high-speed air and its 'lift' vector is somewhat upwards and backwards
the engines thrust vector is upwards and somewhat forwards
the body attitude can be 10 to 15 deg from the vertical (without wind and without a second occupant)
forward airspeed is hard to determine but is rather close to zero
(and the non-blasted part of the symmetrical-section wing may still be lifting somewhat)
and seen other real aircraft so flown incl backwards (groundspeed) in very strong wind ....
even some low enough to be in ground effect ?
Thanks for the video "RC Chinook Bicopter - Part 1".
The good one, is the “Part 2”:
wherefrom the following have been taken.
It is actually a good leason on the "Pendulum Rocket Fallacy".
9:06
Motor is then angled not quite vertical but it’ll be angled at a slight angle, or just to move the thrust line away from the center of mass, and the thrust line will come somewhere down here; now because the thrust line is not in line with the pivot point, there is a perpendicular distance here which, if there’s a force applied at perpendicular distance, will rotate the aircraft back to vertical position; so what’s done trying to get to, is that a mass hanging below a fixed point of thrust (you know a motor or propeller) DOES NOT RIGHT ITSELF LIKE A PENDULUM DOES, AND THIS IS KNOWN AS THE ROCKET PENDULUM FALLACY.
I know it has “rocket” in the name, but it also applies to aircraft that hover such as helicopters.
I KNOW THIS SOUNDS COUNTERINTUITIVE TO SAY THAT THIS AIRCRAFT DOES NOT FLY LIKE A PENDULUM, HOWEVER IF YOU LOOK AT THE FORCE DIAGRAMS IT MAKES COMPLETE SENSE.
Now a film some slow-motion footage of the Chinook at flight and I hope it will try and demonstrate what I’m trying to say here a bit better, so cut to the next scene…
(10:05)
Here is a slow-motion video on this Chinook in a hover and as you can see the connections made by the motor boots are very small and quite hard to see without the slow-motion footage.
TO MAKE THESE CORRECTIONS more visible, I decided to film a clip where I harshly rotated the aircraft to the right and see what happened:
(10:22)
I don’t know about you, but it looked like the swung back to the vertical position almost like a pendulum, but let’s have a look at it again: here you can see that the motors have pivoted to the right due to my right aileron input:
The black dotted line gives an indication to have a thrust line that has been thrown off center from the center of mass; the distance between this red dot and the black dotted line is the “perpendicular distance” that produces the torque; this torque causes the aircraft to rotate clockwise to the right, until the center of mass lines up with the thrust line and there were no more torque produced:
Because there are no more torque acting on the aircraft, the aircraft actually holds its angle until input a left, or counterclockwise aileron input; here you can see that the motors have rotated anti-clockwise to produce a torque in the other direction to bring the aircraft back to level:
The reason why inputted the counterclockwise aileron control is because I didn’t want to slam into the ground and destroy itself; this stem rotates the aircraft to the vertical position as expected, but then I noticed something interesting: the motors are now pointed to the right to produce a clock-wise torque to reduce the counter-clockwise angular velocity; this was a control output from the flight controller because the gyros and accelerometers had to prevent the aircraft from overshooting and rotating too far counterclockwise; this means the aircraft exits the maneuver at a vertical position but also has quite a high horizontal velocity but at least it means it won’t hit the ground …
I would like to thank you very much for watching and Ihope you enjoyed the video.
I’ve been wanting to make a video on the ROCKET PENDULUM FALLACY for quite a while, and this is sort of the perfect time to do it.
END OF QUOTE FROM THE VIDEO
A couple of remarks:
In the second image, the RC Chinook "cruises" losing height. If the throttle is properly opened, the RC Chinook will continue horizontally (no loss of altitude) to "high speed cruise".
To turn to hovering, the rotors have to turn upwardsand and the throttle to be partially closed (this way the height can remain the same).
If the rotors turn backwards (i.e. to the right), the RC brakes initially, and then reverses, say like:
lol manolis, I knew you would mention that pendulum rocket fallacy (FYI he did a video dedicated to the topic).
I would note also that the channel author has a video of a RC wingsuit - which represents a more serious attempt to ensure the controllability of the PF than you have done.
I should have clarified that my observation the design process seemed intuitive, like hang gliding, shifting the body weight, except that there is no fixed wing, instead a rotating pair.
The bicopters 3d stabilization is just old rocket technology in a 30mm cube, theres no reason why Manolis cannot borrow this in his design, maybe add triple redundancy like the large rc plane guys. Simply hardware shopping, but i would recommend the propellors gimble seperately and have variable pitch since the both are at fixed rpm.
“but i would recommend the propellors gimble seperately and have variable pitch since the both are at fixed rpm.”
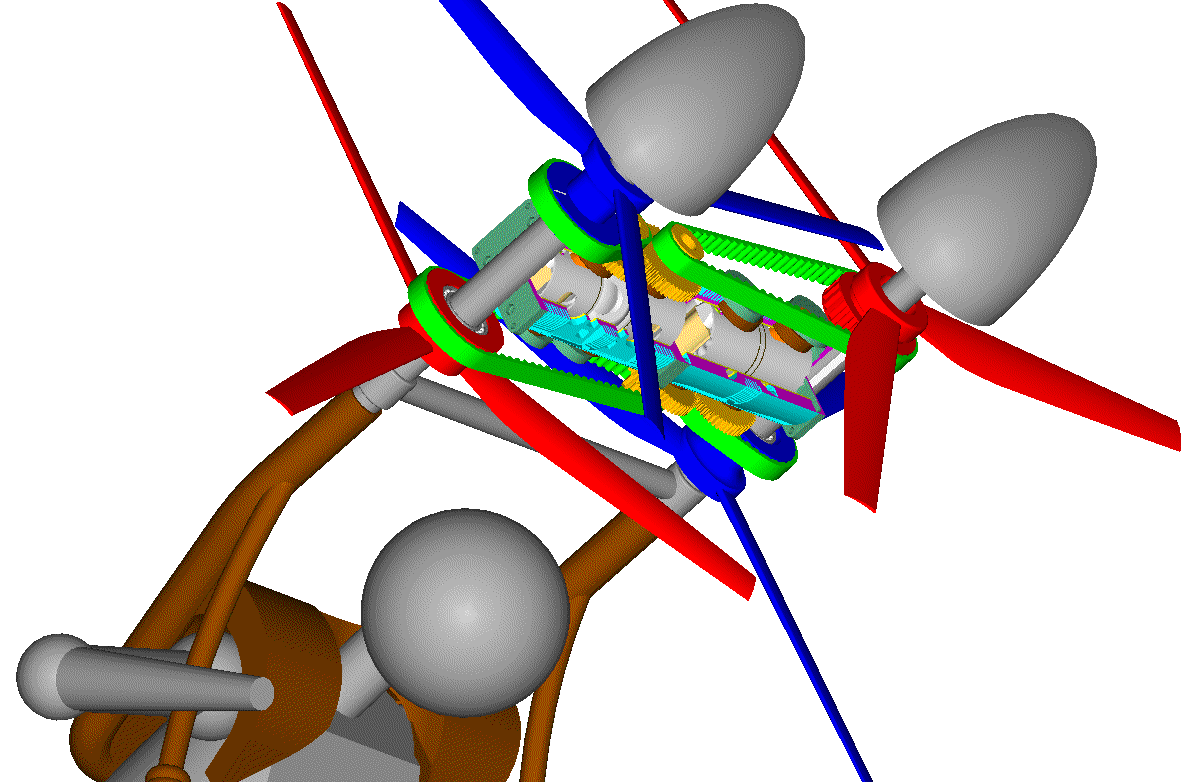
The axes of each independent pair of counter-rotating propellers (they turn at the same (but not fixed) revs) are fixed to each other.
This way each pair of propellers of the Portable Flyer is equivalent with a central propeller rid of reaction torque and rid of gyroscopic rigidity.
If the two axes were not firmly fixed to each other, for the re-vectoring of each propeller axis a strong (huge?) torque would be required.
The casings of the two OPRE Tilting engines connect the two axes and cancel out – internally – the torques required for the re-vectoring of the thrust (i.e. of the propellers).
Quote from http://pattakon.com/GoFly/DTR_1.pdf ARCHITECTURE AND BASIC DESIGN CHARACTERISTICS
The PORTABLE FLYER comprises two OPRE Tilting Engines secured to each other to form (with their casings) the personal flying device’s “backbone”.
And what if the two propellers are not exactly symmetrical?
The pilot has his “weight displacement control” (at all directions) and his “aerodynamic control” to cancel out any “imbalance”.
For instance,
if – for some reason – the one propeller provides, say, 10% more lift than the other, the pilot displaces his body for some 25mm / 1” towards the “stronger” propeller (the propeller axes are at about 500mm distance from each other) to cancel out the thrust imbalance (have you seen a motorcycle heavily loaded at one side? the rider seats with his center of gravity towards the opposite side to balance it).
Similarly for the reaction torque (in this case the pilot arranges his limbs slightly unsymmetrical to cancel out any imbalance of reaction torque from the propellers).
The automatically variable pitch (PatPitch):
is an option allowing the hovering at small power / medium revs (with plenty of backup power for “just in case”) and the high speed cruising without over-revving the engines.
********************
EDIT:
In my previous reply, the slide:
shows how a small offset of the thrust (from the center of mass) causes a strong / fast / abrupt rotation of the aircraft (Zapata can apply a several times larger offset; but is it useful, or “dangerous”, for the stability?)
The next slide:
shows the aircraft “cruising” with the thrust restored along aircraft’s “vertical” axis (otherwise the Chinook RC would continue to turn clockwise).
So, for the fast transition it is initially applied a short-duration small-offset of the thrust from the center of mass (or center of gravity), and then the offset is eliminated; if the throttle was properly opened
how much?
the vertical component of the (green) thrust to be equal to the (red) overall weight
the motion to the left would be a pure horizontal cruising.
manolis, please stop with the rocket fallacy stuff. The question is whether the pilot, by sticking his/her legs into the air stream from the propellers will be able to generate enough torque to control the flyer, and whether the pilot will be able to generate this torque with his/her muscles over time. Yes, a plane can hover in vertical but the control surfaces have to be large enough to effect control; a great example is the Alaskan STOL planes. They are able to lift the tail before moving because of propeller wash. Further, they generate lift by moving air over the wing surface before taking off; you have no aerodynamic surfaces doing so. Again, I suggest you hang by your arms from a bar and see how far you can lift your legs and how long you can do so.
Maybe 1/3 scale model, servos shift the limbs, torso? I agree with the above statement, look at the hang glider, body hangs in a bag and arm shift mass with a thin alloy bar to hold. If you make it easy to use it will catch on and sell,
If its chore people may avoid obtain the skills.
Btw i like the wide rotating paddle wing concept, a bit draggy at the edges though.