Hello Gruntguru.
You write:
“I believe the best method would be attachment via flexures which converge to a point above the powerplant.”
The powerplant of Browning JetPack comprises a central turbine fixed on pilot’s back, and two pairs of turbines fixed on pilot’s arms.
I.e. the powerplant is as fixed on pilot’s body as it gets.
Each pair of turbines has its own “gimbal joint”: it is the shoulder-joint of pilot’s arm whereon the pair of turbines is fixed.
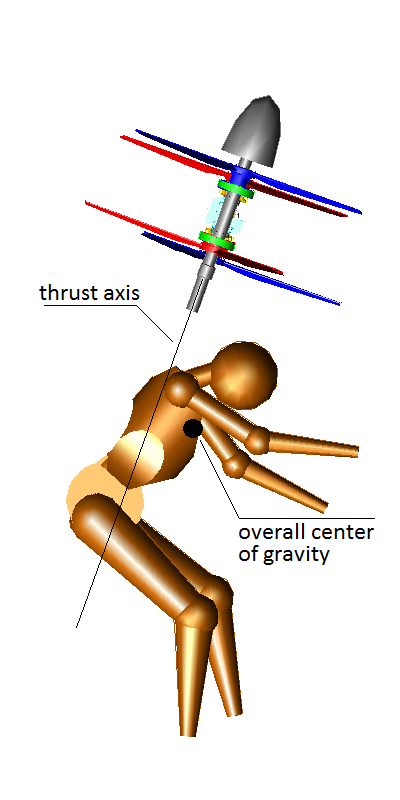
In the Portable Flyer the powerplant is fixed / secured / tighten / fastened on pilot’s back / torso:
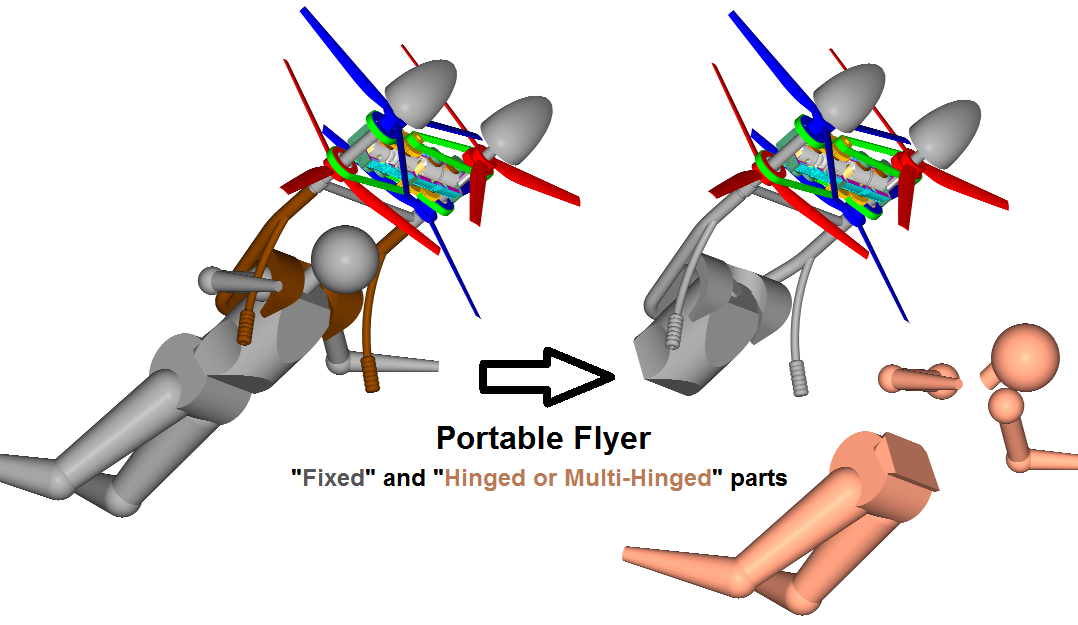
Back, torso and powerplant comprise a (fixed / inflexible) sub-assembly (grey color) shown at right-top in the above drawing.
All the rest parts of pilot’s body (beige color, bottom right), i.e. the hip, the legs, the arms and the head are completely free to move; these free to move parts comprise the big percentage of the human weight.
”Mobility” and Portable Flyer
A person wearing a Portable Flyer can move hip, head and limbs through their full range of motion.
I.e. the mobility of the head, of the hip and of the limbs is not at all restricted by the Portable Flyer.
If the wind tunnel dancer of the video of my last post was wearing a Portable Flyer on her back / torso, she could move her body parts (relative to each other) the same way.
Hovering, braking, backwards motion, forwards acceleration, high speed cruising
Hovering, vertiacal take-off and vertical landing:
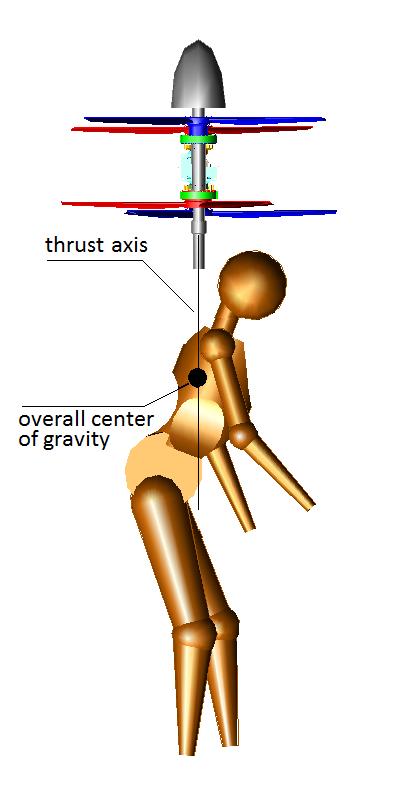
During vertical take-off, vertical landing and hovering the pilot has to bend forwards (as in the drawing) in order to keep the thrust normal to the horizon and the overall center of gravity on the thrust axis.
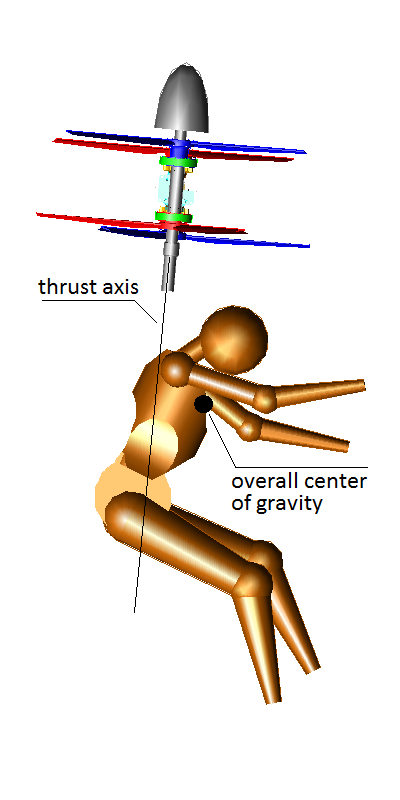
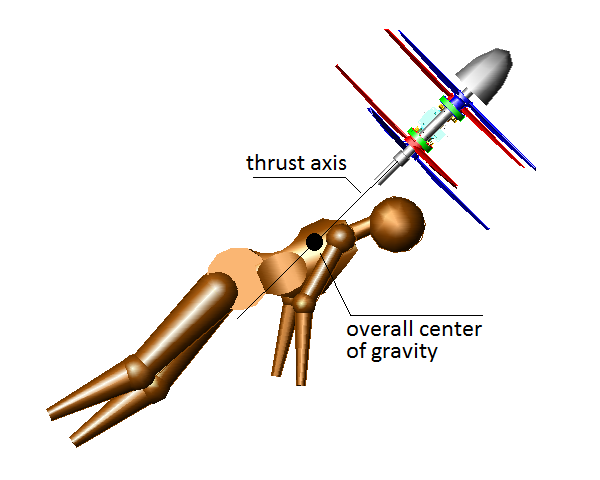
Transition from hovering to backwards motion:
The pilot leans his head backwards, and bends his legs / arms backwards causing the displacement of the overall center of gravity aft the thrust axis. This causes the rotation of the Portable Flyer counter-clock-wise (above drawing). The horizontal component of the thrust accelerates the Flying Device backwards. When the thrust is at the desirable direction the pilot has to restore his initial posture in order to stop the rotation and continue moving backwards parallel to himself.
The same for the braking. The Pilot moves his head / limbs in order to displace the overall center of gravity aft the thrust axis; this causes a fast rotation of the device / pilot assembly creating the necessary horizontal backwards braking force. Soon after the pilot has to re-arrange his hip / head / limbs in order to displace the overall center of gravity on the thrust axis.
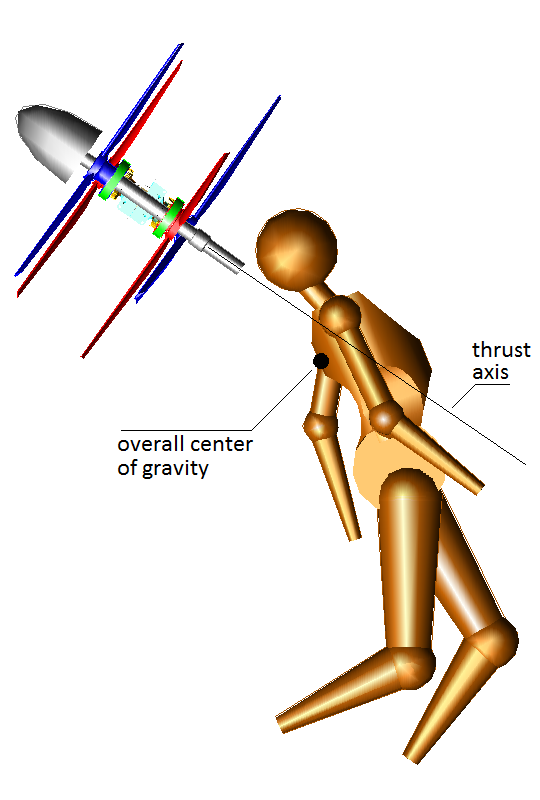
Transition from hovering to forward flight:
Being at hovering, the pilot bends his legs, hip, head and arms forwards. The overall center center of gravity is displaced fore the thrust axis creating a moment (torque) that rotates the device / pilot assembly clockwise. The more the thrust axis leans forwards, the stronger the horizontal component of the thrust force that accelerates forwards the Portable Flyer with the pilot:
If the pilot keeps his posture, the clock-wise rotation will continue (if the Portable Flyer is at a big altitute, it will perform loops as it falls).
When the pilot decides, he changes his body posture so that the overall center of gravity moves – initially – aft the thrust axis (in order to stop the rotation of the Portable Flyer) and then the pilot changes again his body posture in order to move the overall center of gravity on the thrust axis:
Now the Portable Flyer cruises at a velocity, with the pilot making “micro-alignments” in order to keep constant the direction of the thrust axis, with the overall center of gravity on the thrust axis. If he wants to cruise faster, he opens the throttle (this will also increase the altitude unless the pilot turns slightly forwards the thrust axis: this will increase the horizontal force without increasing the vertical lift).
All the above body postures are easy. Lying on a bed and turning to the side, one can replicate all the above posture.
In order to realize the previous modes of flight and the transitions mentioned, the weight displacement control is sufficient.
However the “aerodynamic control” is also available.
Combining the two methods, the control over the flight of the Portable Flyer goes to higher levels as compared to the existing JetPacks of Mayman / Zapata / Browning.
Worth to mention again:
It has nothing to do with a static equilibrium.
It is a dynamic equilibrium wherein the pilot feels and reacts to correct.
[You also write:
“. . and coaster's video confirms it will take a lot more than legs in the slipstream to achieve control and stability in hover.”
The pilot of the Portable Flyer has the option to use his limbs and head as ailerons to create the required torque for pitch / yaw / roll control.
The JetPacks cannot use this kind of control (i.e. the aerodynamic control) at hovering / low cruise speeds.
The extent of the “aerodynamic control” is analyzed in my last post.
Count how many times, during a second, the wind tunnel dancer changes direction and pose.
If she was sky-diving, she would do exactly the same aerobatics / dance during her fall.
I read several suggestions to add “gimbal joints”, subframes, fuselage, seat, landing gearing, “flexures converging high”, fins, electronic control systems, etc, etc.
However without all these, the Portable Flyer in its simplest form is fully functional and fully controllable.
For such an application the simpler, the lighter, the cheaper, the more reliable, the more responsive, is the better.
In engineering a big challenge is to do more with less.
Quote from
https://www.pattakon.com/GoFly/DTR_1.pdf
This is what the PORTABLE FLYER is: it is like an extension of the human body and it is providing the required power in a true neutral way. The brain, the senses and the muscles do the rest.
. . .
The body, the eyes and the senses of the pilot/rider are available; why not to use them as the fuselage, the sensors and the control system?
Isn’t this what the birds are doing?
Relative to the birds, the low power to weight ratio of the human body is the only thing that restricts us from flying / hovering.
This lack of power is what the OPRE Tilting engines and the propellers are curing at a true “neutral” and efficient way.
Thanks
Manolis Pattakos