Or, nzjrs, instead of yet another post relentlessly providing opinion-based gainsaying,
perhaps you could build a flying (Reynolds number compensated) scale model, to prove your point?
Or, nzjrs, instead of yet another post relentlessly providing opinion-based gainsaying,

Indeed, I did suggest scale model building too, as a means to verify some of manolis opinions.J.A.W. wrote: ↑06 Oct 2020, 09:43Or, nzjrs, instead of yet another post relentlessly providing opinion-based gainsaying,
perhaps you could build a flying (Reynolds number compensated) scale model, to prove your point?
Can an English speaking member of this forum translate to Rodak my last post?


Sorry this is incorrect. I think what you meant to say was:coaster wrote: ↑07 Oct 2020, 12:33The pilot training manual for PF states;
"In order to control the machine, physical training must be practiced regularly. This normally involves standing face towards a cinder block wall and repeatedly thrusting the pilots forehead towards the cinder blocks"
Can it be any clearer?
Sitting is NOT the same as hanging...... Please try hanging from a bar and getting your legs to 90° from your torso. So does your flyer use the same system as Rossy, a modified parachute harness type thingy? It's still unclear.See from 6:06 to 6:09; Rossy is sitting (with the DeltaWing secured on his back / torso, ready to fly) with his legs at an angle of about 90 degrees from his spine.

A trunnion mount would be a tethered test.manolis wrote: ↑06 Oct 2020, 04:45
You also write:
“You might even trunnion mount it In a suitable structure and verify some of your thoughts on controllability.”
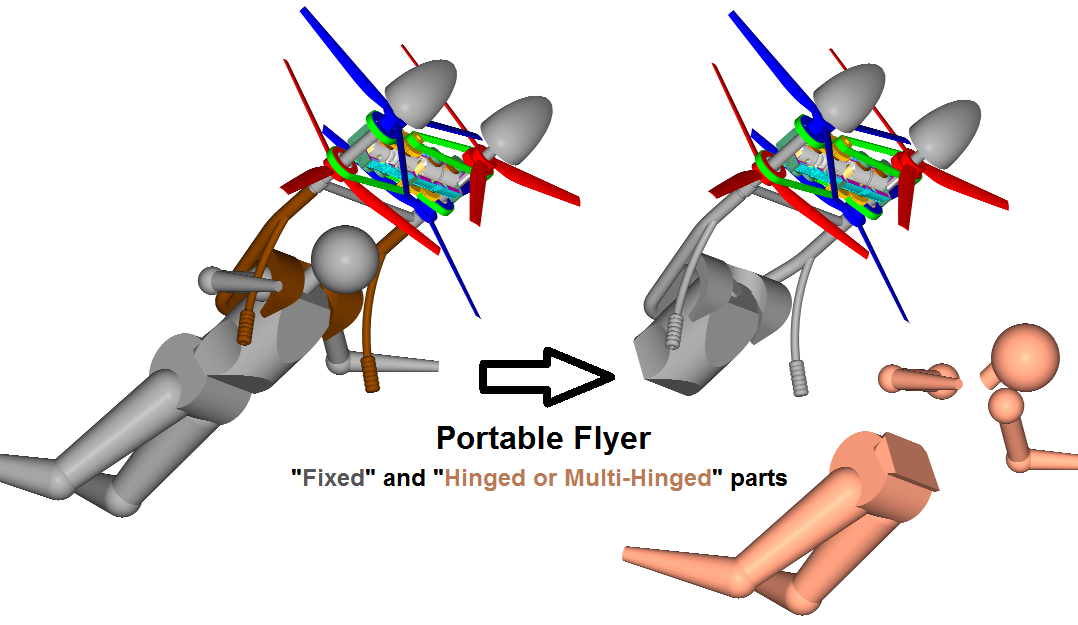
The simplest way is, after the measurement of the “static” thrust (and the reliability tests) to secure a saddle (the brown part) on pilot’s back / torso, then secure the Portable Flyer on the saddle and make tethered tests