The weight of the hoverbike is 114 kg (253 pounds)
Hoverbike S3 2019 contains this hybrid type battery with acapacity of 12.3 kWh, which allows you to fly (up to 40 minutes in the drone mode. The actual flight time with the pilot is between 10 to 25 minutes dependent on weight and weather conditions.
New engines with increased power to 33 kW each.
New 3-bladed carbon propellers are quieter by 10% than double-bladed propellers, smaller in diameter by 5 cm and give a total thrust of 364 kg (802 pounds).
End of Quote
According the following image (is there a better / clearer version in the Internet?) :
each of the four rotors of the Scorpion S3 is 1.2m in diameter.
So,
each 1.2m diameter rotor, powered by a 33kW (45bhp) motor, provides up to 364Kg / 4 = 91Kg (200lb) thrust.
Un-ducted.
You write:
"and its makers say - 'by law' it's limited to 60 mph
would that law apply eg to the PF ?"
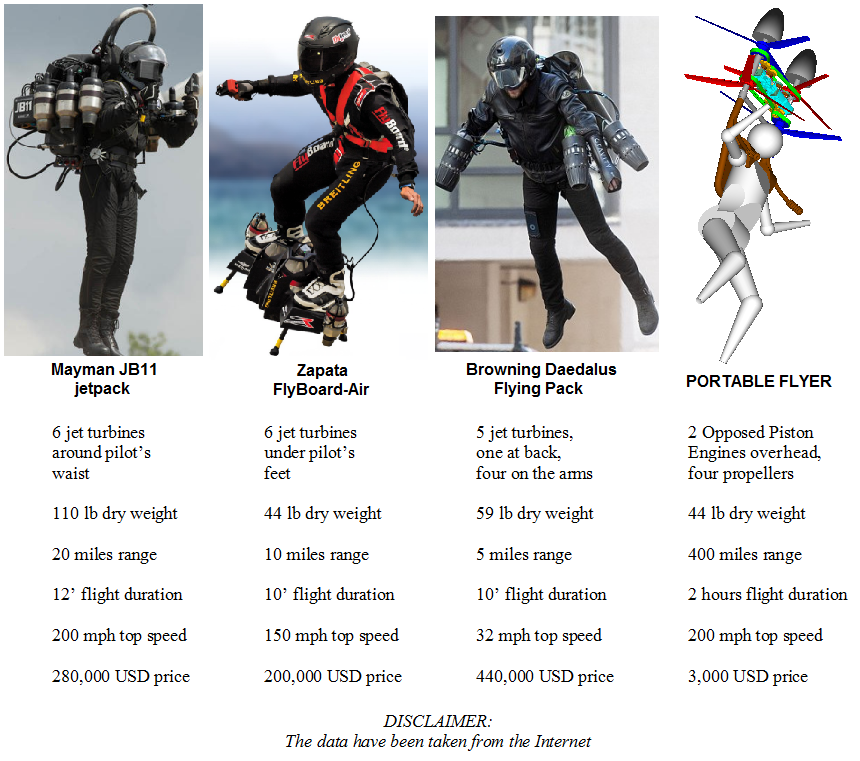
Browning's speed record is ~135Km/h
Zapata (who claims 150mph top speed) crossed the English Channel flying at an average speed of 140Km/h.
Mayman claims 200mph top speed.
And Yves Rossy does fly over Dubai with more than 300Km/h.
Actually Yves Rossy cannot fly at speeds below 100Km/h.
The "laws" limiting the maximum speed of Personal Flying Devices have to change, because the world and the technology have changed.
Can you think some arguments supporting the 60mph / 96Km/h speed limit for the Personal Flying Devices?
I can think several reasons / arguments for the usefulness and the safely offered by the opposite:
A 2,000Kg car running at 100mph can make a huge damaged when it strikes something; a 20Kg Flying Device (100Kg including the pilot) flying with 300Km/h cannot do a similar damage to the others / to the surrounding.
A Flying Device (say the Portable Flyer) flying at 300Km/h 5m above the sea is much safer (for the others) than a boat running at 20knots.
Flying at low speeds requires much more energy to cover a specific distance. More energy means more refueling stops, or more recharging stops.
Remember what happened to Zapata at his first attempt to cross the English Channel? During his necessary refueling stop at the middle of the Channel, Zapata lost the control and fallen into the sea.
The take-off and the landing are the most dangerous part of “any” flight.
If I can fly “non-stop” for 200miles, while Zapata, Mayman, Browning and Rossy need to stop every 10miles for refueling, I need one only take-off and one only landing while the JetPacks need 20 take-offs and 20 landings in order to cover the same 200miles distance (and this provided there are refueling stations every 10 miles).
Having two independent propulsion units (each alone capable for emergency landings), having also two parachutes (for just in case, say when it runs out of fuel), the safety is improved.
Flying in adverse conditions, like sudden weather change, gusts of wind, rain etc is a big risk in case of underpowered flying devices having large surfaces exposed to the wind.
The ability for high speed flights is mandatory for the safety; at windy weather a big size / slow moving (“hovering”) flying device is a “feather in the wind”.
A personal flying device having 30 kts maximum speed and flying along a sea shore, has a big safety risk when the wind starts blowing towards the sea at, say, 35kts.
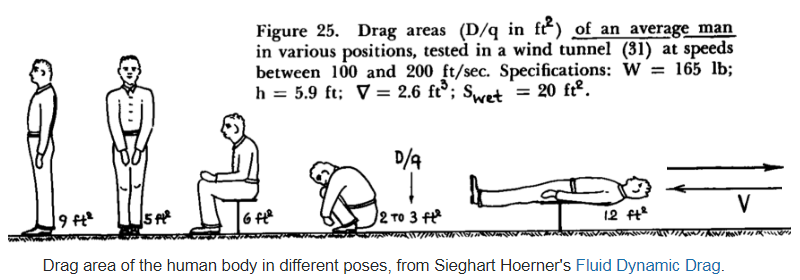
Because every flying object is at the mercy of any gust of the wind, the most important characteristics for safety seem to be: the small frontal area, the small drag coefficient, the high power to weight ratio, and the ratio of the power to the product of the frontal area times the drag coefficient.
The human body is very well streamlined when hovering vertically and when cruising near horizontal. If the PORTABLE FLYER can fly way faster than the wind, the strong wind and the strong wind gusts are not a problem any longer.”
The abovementioned 30kts maximum speed is not theoretical: the winner of the GoFly – BOEING contest could be a Flying Device not capable to fly with speeds over 30kts!
A. ..... arguments supporting the 60mph / 96Km/h speed limit for the Personal Flying Devices?
B. Flying at low speeds requires much more energy to cover a specific distance....
simply ....
A. above 60 mph wings are much more efficient than are propellers-used-as-rotors as in PF & EHang & Hoverbike
B. so flying at low speeds requires much more energy per distance only with PUAR as in PF & EHang & Hoverbike etc
because ....
lift efficiency requires accelerating a large piece of air (downwards) by a small amount - an aeroplane wing does this
often a helicopter accelerates a smaller piece of air by a larger amount - this is less efficient
an EHang or Hoverbike (and often a PF) accelerates a much smaller piece of air by a much larger amount - much less efficient
(their disc loading being about 5x the disc loading of a helicopter)
significantly ....
aeroplanes use rotating 'wings' (propellers) giving a quite small amount of air a large amount of acceleration ....
to tow wings that give a large amount of air quite a small amount of acceleration
significantly ....
aeroplanes use rotating 'wings' (propellers) giving a quite small amount of air a large amount of acceleration ....
to tow wings that give a large amount of air quite a small amount of acceleration
Also significant.
- The aeroplane propeller accelerates a much larger quantity of air than the same size propeller used as a rotor.
- The air is accelerated far less in the aeroplane case. The propeller is moving at high speed through the air - the accelerated air does not achieve a high velocity relative to the nearby, stagnant air.
“A (ref to ..... arguments supporting the 60mph / 96Km/h speed limit for the Personal Flying Devices?).
above 60 mph wings are much more efficient than are propellers-used-as-rotors as in PF & EHang & Hoverbike”
I think you mean “propeller thrust + stationary wing lift”.
I also think you mean speeds not above but well above 60mph.
OK: at high speeds the fixed wing are more efficient than the rotary wing.
What I can’t get is how this “supports” the laws limiting the speed of the Personal Flying Devices to 60mph.
If you consider the “time” parameter, too, the “efficiency thing” gets clearer.
Suppose one goes from ”here” to “there” in 10 minutes with the Portable Flyer (cruise speed 300Km/h), and in 30 minutes with a conventional quad-copter like the e-Hang-841 (cruise speed 100Km/h).
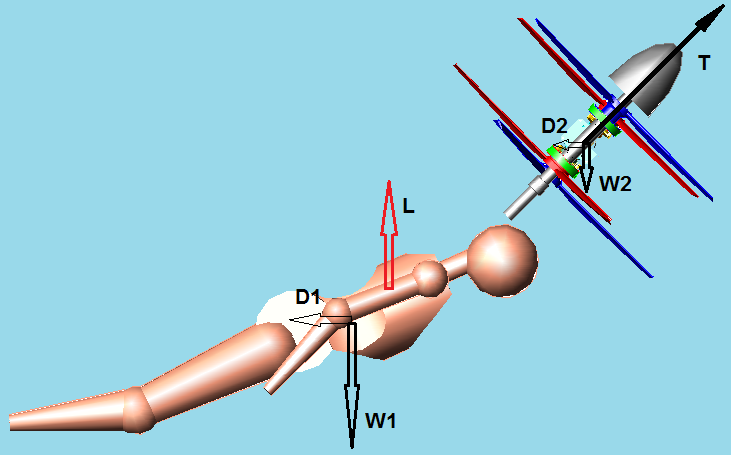
Ignoring the lift provided by the “near horizontal” body of the Portable Flyer pilot,
ignoring the several times reduced “frontal area” due to pilot’s body posture,
ignoring also the several times lower drag coefficient (streamlined human body),
the Portable Flyer has to pay for 10 minutes “hovering”, while the quad-copter e-Hang-841 pays for 30 minutes “hovering”.
Taking under account the 3+ times total weight of the electric e-Hang, its necessarily long duration “hovering” becomes a big issue, while for the light-weight Portable Flyer the hovering issue is not significant.
Things get even better if the pilot of the Portable Flyer wears a wing-suit (but this for medium cruise speeds (say around 200Km/h); at higher speeds the wing-suit is not necessary / useful).
Enjoy the following video
wherein Browning (whose top speed is below 140Km/h) wearing a wing suit, flies over a lake. Spot on his leaning angle.
The first wing-suiter who achieved a powered flight is Visa Parviainen.
With the pilot wearing a wing suit or a tracking suit, at 100mph cruising speed (87kts / 160Km/h / 44.5m/sec) the required thrust is about 66lb (30Kp, 300N and the calculated power is 300N*44.5m/sec = 13.5kW = 18bhp (data taken from the “First jet powered Birdman flight” at http://www.dropzone.com/news/General/Fi ... _flight_61 3.html )”
If one can fly at 100mph speed consuming some 25bhp of power, then his mileage is better than riding a motorcycle or a car; and the improvement on the fuel economy is even better than the improvement of the mileage because in order to go to a specific destination the Portable Flyer pilot follows a straight line, while the road vehicles have to follow the road.
According the previous, the Portable Flyer is different.
You also write:
“B. (ref to Flying at low speeds requires much more energy to cover a specific distance....)
so flying at low speeds requires much more energy per distance only with PUAR as in PF & EHang & Hoverbike etc
because ....
lift efficiency requires accelerating a large piece of air (downwards) by a small amount - an aeroplane wing does this
often a helicopter accelerates a smaller piece of air by a larger amount - this is less efficient
an EHang or Hoverbike (and often a PF) accelerates a much smaller piece of air by a much larger amount - much less efficient
(their disc loading being about 5x the disc loading of a helicopter)
significantly ....
aeroplanes use rotating 'wings' (propellers) giving a quite small amount of air a large amount of acceleration ....
to tow wings that give a large amount of air quite a small amount of acceleration”
Take the Osprey V22:
It can be considered as a “problematic” helicopter (no autorotation, some 3 times heavier “disk loading” than the Chinook CH47 making it inefficient at hovering, etc, etc ), and is not the best airplane.
However, it is an overall successful transportation means because it combines several characteristics that make it a better “tool”.
The Portable Flyer is a scaled down version of the Osprey V22.
With its PatPitch (automatic variable pitch) propellers it requires substantially less power to hover without limiting its top cruise speed.
Great video. If you are correct about 300 km/hr flight without a wing suit, Browning should be able to close his legs and go much faster. Interesting he flies with the wrist thrusters pointing outwards at about 45 degrees - losing about 30% of the thrust in the process.
“A (ref to ..... arguments supporting the 60mph / 96Km/h speed limit for the Personal Flying Devices?).
above 60 mph wings are much more efficient than are propellers-used-as-rotors as in PF & EHang & Hoverbike”
I think you mean “propeller thrust + stationary wing lift”.
I also think you mean speeds not above but well above 60mph.
OK: at high speeds the fixed wing are more efficient than the rotary wing.
What I can’t get is how this “supports” the laws limiting the speed of the Personal Flying Devices to 60mph.
If you consider the “time” parameter, too, the “efficiency thing” gets clearer.
Suppose one goes from ”here” to “there” in 10 minutes with the Portable Flyer (cruise speed 300Km/h) ....
.... the pilot of the Portable Flyer wears a wing-suit (but this for medium cruise speeds (say around 200Km/h); at higher speeds the wing-suit is not necessary / useful).
With the pilot wearing a wing suit or a tracking suit, at 100mph cruising speed (87kts / 160Km/h / 44.5m/sec) the required thrust is about 66lb (30Kp, 300N and the calculated power is 300N*44.5m/sec = 13.5kW = 18bhp
.... The Portable Flyer is a scaled down version of the Osprey V22.
With its PatPitch (automatic variable pitch) propellers it requires substantially less power to hover without limiting its top cruise speed.....
a 60 mph limit is presumably intended to be fair (in allocating airspace) to .....
the part of 'new aviation' that is EHang etc and its customers and to the existing aviation and its customers
each being given opportunity to do what it does best
regarding 'efficiency' - slow speed wing-borne flight isn't less efficient (energy per trip) than high speed
the Antares 20E (a 660 kg 174 mph electric SLMG self-launch-motor-glider) needs c.5 kW to fly level at c.100 km/h
(max climb is 4.4 m/sec on 38 kW and min sink unpowered is 0.49 m/sec)
having a wing loading of 11 lb/sq ft this is a practical plane eg regarding climb and wind tolerance etc
btw 'self-sustaining' (not self-launch) gliders usually have 18-30 hp 2 stroke engines - run only intermittently and WOT
the 1923 English Electric Wren did 50 mph max or climbed c.200 ft/min on 8 hp ICE
ie cruised on 5 hp and did 87.5 mpg
with a wing loading of 3 lb/sq ft this wasn't a practical plane - and neither is human-powered flight in ground effect on c. 1 hp
but the 1980s Quickie homebuilt doing 126 mph on an 18 hp 4 stroke ie 110 mph on 10 hp is - climb rate 420 ft/min
once (or if) design fixes had emerged for the usual laminar flow airfoil issues
also the Quickie 2 (2 seater)
and the BD-5 would cruise at 230 mph on a 70 hp engine (once I was shown one Civic-powered)
regarding the PF - what is the 'propeller blast' velocity round the pilot's head at cruise flight speeds of 300 km/h ?
regarding the PF - as a mini-Osprey how does it's (body or wingsuited body) 'wing' efficiency compare to the Osprey's ?
You write: "a 60 mph limit is presumably intended to be fair (in allocating airspace) to .....
the part of 'new aviation' that is EHang etc and its customers and to the existing aviation and its customers each being given opportunity to do what it does best "
There are fairer / simpler ways “in allocating airspace”.
Say, the Personal Flying Devices are allowed to fly at altitudes lower than, say, 1,000ft / 300m from the ground.
This does allocate free / safe space to the conventional airplanes / helicopters.
You also write: "regarding 'efficiency' - slow speed wing-borne flight isn't less efficient (energy per trip) than high speed. . .”
The worst efficiency is when a flying device is hovering: the mileage is 0mpg.
However hovering is, in some cases, crucial (say, at rescue).
The challenge is to combine both: hovering (including vertical take off / vertical landing), and cruising efficiently at high speeds, i.e. what the Osprey V22 does.
You also write: regarding the PF - what is the 'propeller blast' velocity round the pilot's head at cruise flight speeds of 300 km/h ?”
A little more than 300Km/h.
Yves Rossy knows how amusing / “refreshing” this is.
Also the drivers of the high capacity / sport motorcycles know how this is.
A 200Kg motorcycle running on the road (one only dimension) with 300Km/h is dangerous for its driver and for the others.
A 20Kg Portable Flyer flying at 300Km/h in the open sky (three available dimensions to avoid any obstacle), or 5m above the sea, looks a safer transportation means for its driver and for the others.
You also write: regarding the PF - as a mini-Osprey how does it's (body or wingsuited body) 'wing' efficiency compare to the Osprey's ?”
Osprey V22:
Take off weight: ~ 20,000Kg
Power: ~ 2*4,500=9,000kW
Top speed: ~ 500Km/h
Wing loading: ~ 100Kg/m2
A wingsuiter needs some 15kW of power to sustain horizontal flight at around 100mph / 160Km/h (Visa Parviainen used two small jet-turbines, each developing 16Kg of thrust).
Assuming 1.5m2 wing area and 100Kg total weight, the wing loading is 67Kg/m2 (2/3 of that of the Osprey V22).
I.e. at 100mph a good wingsuit provides 100Kg lift which is “penalized” by 32Kg thrust (1/3 thrust to lift ratio).
In “comparison”, at 500Km/h (=140m/sec) the Osprey V22 consumes 9,000kW, which means the aerodynamic drug is 6,400Kg while its weight (i.e. the aerodynamic lift) is 20,000Kg (which gives the same 1/3 thrust to lift ratio, but at 3 times higher speed).
At 200mph the required area for the same 100Kg lift of the wingsuiter is: 1.5m2*(1/2)^2=0.4m2
Without a wingsuit, the human body has the necessary surface (0.4m2):
but the human body is not as aerodynamic (with reference to lift to drag ratio) as a wingsuit.
But the thrust of the Portable Flyer can be vectored slightly upwards
to take the part of the weight not taken by the aerodynamic lift.
A. There are fairer / simpler ways “in allocating airspace”.
Say, the Personal Flying Devices are allowed to fly at altitudes lower than, say, 1,000ft / 300m from the ground.
This does allocate free / safe space to the conventional airplanes / helicopters.
A 20Kg Portable Flyer flying at 300Km/h in the open sky... or 5m above the sea ....
B. A wingsuiter needs some 15kW of power to sustain horizontal flight at around 100mph / 160Km/h (Visa Parviainen used two small jet-turbines, each developing 16Kg of thrust).
Assuming 1.5m2 wing area and 100Kg total weight, the wing loading is 67Kg/m2 (2/3 of that of the Osprey V22).
I.e. at 100mph a good wingsuit provides 100Kg lift which is “penalized” by 32Kg thrust (1/3 thrust to lift ratio).
In “comparison”, at 500Km/h (=140m/sec) the Osprey V22 consumes 9,000kW, which means the aerodynamic drug is 6,400Kg while its weight (i.e. the aerodynamic lift) is 20,000Kg (which gives the same 1/3 thrust to lift ratio, but at 3 times higher speed).
but the human body is not as aerodynamic (with reference to lift to drag ratio) as a wingsuit.
But the thrust of the Portable Flyer can be vectored slightly upwards to take the part of the weight not taken by the aerodynamic lift.
By the way, more close to the Portable Flyer is the POGO_XFY_1
apologies for the lumpy editing of M P's post ....
the suggestion to segregate airspace at 1000' agl (quoted above as A.) seem implausible as ....
most airspace is uncontrolled - in such airspace there is no basis for (safe) flight without visual references
ie often the weather (low cloud) forces fixed-wing aircraft (against their preference) to fly below 1000' agl
and the small/numerous helicopters generally prefer eg 550' to minimise the risk in any autorotative landings
new aviation via autonomous vehicles needs automatic traffic/navigation control and flight control/stability systems
the PF seems to intend none of these
flying 5m above the sea has a poor safety record and is illegal if it includes going closer than 500' to a person or vessel etc
flying eg 5m above the sea should be reserved for hovercraft and other vehicles in ground effect eg EHangs or WIGEs
the statement (quoted above as B.) seems implausible as ....
glide ratio (ie overall l:d ratio) of the Osprey is 4.5:1 (this with huge drag of the non-feathering non-freewheeling proprotors)
the overall l:d ratio of a typical airliner is c.20
so for 'airplane mode' with 2 working gearboxes and 1 or 2 working engines the ratio is c. 10 (my guesstimate)
single-engine it airplanes better than it hovers ie it can airplane-fly on 3000 kW (not 9000 kW)
and the XFY-1 has far more wing (relatively) and a far greater overall l:d ratio than the PF does
in flight idle it did 350 mph (so transition now aka conversion mode was borderline impossible)
Airspace could certainly not sustain large numbers of PF's being used in wing mode as transportation. As presented, the pilot has limited forward vision with his face pointing down (and slightly forward) while travelling at 300 km/hr? Mid air collisions would be certain.
The “airspace allocation” laws were made at times wherein Personal Flying Devices (like the JetPacks), Flying Taxis (like the e-Hang) and the similar did not exist.
We could argue for ever without agreeing.
You write:
" new aviation via autonomous vehicles needs automatic traffic/navigation control and flight control/stability systems
the PF seems to intend none of these "
The Portable Flyer is a pilot wearing a propulsion system.
The traffic control system informs / warns the pilot and the pilot responds accordingly.
You also write:
"flying 5m above the sea has a poor safety record and is illegal if it includes going closer than 500' to a person or vessel etc
flying eg 5m above the sea should be reserved for hovercraft and other vehicles in ground effect eg EHangs or WIGEs "
Think the case of a swimmer in danger (or of a person on the roof of a building / skyscraper in fire, or a person blocked in the middle of a wild-fire), and the pilot of the Portable Flyer not allowed to approach closer than 500ft to rescue the person in danger.
Or a road accident wherein a heavily injured / bleeding person is near to die, with the doctor wearing the Portable Flyer not allowed to land nearby to provide first aids.
When Zapata with his JetPacks wanted to make a demonstration in Florida / USA, the administration there warned him the law was not allowing it.
Zapata did the demonstration and was punished with a huge fine.
Enjoy the following video of Zapata, titled “Jet Engines Strapped to Feet Going 103.4 MPH!”, to show the stupidity of the law:
Things change.
And the laws have to adapt to the future, not to restrict the future according the old laws.
You also write:
“the statement (quoted above as B.) seems implausible as ....
glide ratio (ie overall l:d ratio) of the Osprey is 4.5:1 (this with huge drag of the non-feathering non-freewheeling proprotors)
the overall l:d ratio of a typical airliner is c.20
so for 'airplane mode' with 2 working gearboxes and 1 or 2 working engines the ratio is c. 10 (my guesstimate)
single-engine it airplanes better than it hovers ie it can airplane-fly on 3000 kW (not 9000 kW)”
What I used is pure maths.
The top speed of the OSPREY V22 is 500Km/h and is achieved with both engines running at full throttle, and with the proprotos axes horizontal.
As a military airplane, a slightly higher top speed is crucial.
At 500Km/h speed (v=140m/sec) the engines run at their maximum power (P=9,000kW). If not, the pilot would increase the proprotors pitch to increase further the speed and milk all the available power from the engines.
If F is the drag in N (Newton), then:
P=v*F, i.e. F=P/v=9,000,000w / (140m/sec) = 64,000N = 6,400Kgf
With 20,000Kgf total weight and 6,400Kgf drag, the drag to lift ratio is 1/3.
“and the XFY-1 has far more wing (relatively) and a far greater overall l:d ratio than the PF does
in flight idle it did 350 mph (so transition now aka conversion mode was borderline impossible)”
Sorry but I cannot follow you.
Make it simpler.
Where is the problem you see?
You write: "As presented, the pilot has limited forward vision with his face pointing down (and slightly forward) while travelling at 300 km/hr? Mid air collisions would be certain."
Compare to Yves Rossy (JetMan) whose face (with his neck straight) is pointing down while flying at 300Km/h:
Nobody restricts the Portable Flyer pilot to turn his face upwards or to the sides to check at all directions.
In the GoFly / BOEING contest, in the "sightlines" (open air experience) topic, the answer was: "the field of view of the pilot is the same with and without the Portable Flyer".
....
What I used is pure maths.
The top speed of the OSPREY V22 is 500Km/h and is achieved with both engines running at full throttle, and with the proprotos axes horizontal.
At 500Km/h speed (v=140m/sec) the engines run at their maximum power (P=9,000kW). If not, the pilot would increase the proprotors pitch to increase further the speed and milk all the available power from the engines.
If F is the drag in N (Newton), then:
P=v*F, i.e. F=P/v=9,000,000w / (140m/sec) = 64,000N = 6,400Kgf
With 20,000Kgf total weight and 6,400Kgf drag, the drag to lift ratio is 1/3.....
again .... no .....
the max power of 2 T-406 (now AE-1107-C) engines is 9000 kW (c. 6000 hp each) .... AT SEA LEVEL
but at medium altitude (20000') the max power is c. 3600 hp each
the V22 transmission was designed for these worst cases ......
5700 hp from one engine working and one engine inoperative ONI .... or ....
4750 hp from each engine when in dual engine operation DEO in helicopter mode .... or ....
4200 hp from each engine DEO in airplane mode (same torque but proprotor runs at 333 rpm ie is 84% of helicopter mode's)
ie typically power from each engine DEO in airplane mode is 2500 - 3000 hp
see ASME 1990 paper 90-GT-245 'T 406 Engine Development Program' by Arvin & Bowman
when the V22 project started the intended glide ratio was 8 in airplane mode and 3 in helicopter mode
see Flight Safety Foundation (article 'Tiltrotor Offers a Choice' in) 'Helicopter Safety' Vol 14 No 6